
1. Introducción
ARCore es una plataforma que permite crear apps de realidad aumentada (RA) en dispositivos móviles. La API de Depth de ARCore de Google proporciona acceso a una imagen de profundidad para cada fotograma de una sesión de ARCore. Cada píxel de la imagen de profundidad proporciona una medición de la distancia entre la cámara y el entorno.
La API de Raw Depth proporciona imágenes de profundidad que no se pasan por operaciones de filtrado en el espacio de la pantalla diseñadas para suavizar e interpolar los resultados. Estos valores son más precisos geométricamente, pero pueden contener datos faltantes y estar menos alineados con la imagen de la cámara asociada.
En este codelab, se muestra cómo usar la API de Raw Depth para realizar análisis de geometría 3D de la escena. Crearás una app simple compatible con RA que usa datos de profundidad sin procesar para detectar y visualizar la geometría del mundo.
Las APIs de Depth y Raw Depth solo son compatibles con un subconjunto de dispositivos que admiten ARCore. La API de Depth solo está disponible en Android.
Qué compilarás
En este codelab, compilarás una app que usa imágenes de profundidad sin procesar de cada fotograma para realizar un análisis geométrico del mundo que te rodea. Esta app hará lo siguiente:
- Comprueba si el dispositivo de destino admite Depth.
- Recupera la imagen de profundidad sin procesar para cada fotograma de la cámara.
- Proyecta nuevamente las imágenes de profundidad sin procesar en puntos 3D y filtra esos puntos según la confianza y la geometría.
- Usa la nube de puntos de profundidad sin procesar para segmentar objetos 3D de interés.
|
Vista previa de lo que compilarás. |

Nota: Si tienes algún problema durante el codelab, ve a la última sección para obtener algunas sugerencias.
2. Requisitos previos
Necesitarás hardware y software específicos para completar este codelab.
Requisitos de hardware
- Un dispositivo compatible con ARCore con la depuración por USB habilitada, conectado a través de un cable USB a la máquina de desarrollo (este dispositivo también debe ser compatible con la API de Depth;
Requisitos de software
- SDK de ARCore 1.31.0 o versiones posteriores
- Una máquina de desarrollo con Android Studio (v4.0.1 o una versión posterior) instalado
3. Configurar
Configura la máquina de desarrollo
Conecta tu dispositivo ARCore a la computadora mediante un cable USB. Asegúrate de habilitar la depuración por USB en el dispositivo. Abre una terminal y ejecuta adb devices, como se muestra a continuación:
adb devices List of devices attached <DEVICE_SERIAL_NUMBER> device
El <DEVICE_SERIAL_NUMBER> será una string única para tu dispositivo. Antes de continuar, asegúrate de ver únicamente un dispositivo.
Descarga e instala el código
Puedes optar por clonar el repositorio de la siguiente manera:
git clone https://github.com/googlecodelabs/arcore-rawdepthapi
O bien, puedes descargar este archivo ZIP y extraerlo:
Sigue estos pasos para comenzar a trabajar con el código.
- Inicia Android Studio y elige Open an existing Android Studio project.
- Navega al directorio local en el que almacenaste el archivo ZIP de Raw Depth.
- Haz doble clic en el directorio
arcore_rawdepthapi_codelab.
El directorio arcore_rawdepthapi_codelab es un solo proyecto de Gradle con varios módulos. Si el panel Project no se muestra en la parte superior izquierda de Android Studio, haz clic en Projects en el menú desplegable.
El resultado debería verse como el siguiente:
| Este proyecto contiene los siguientes módulos:
|
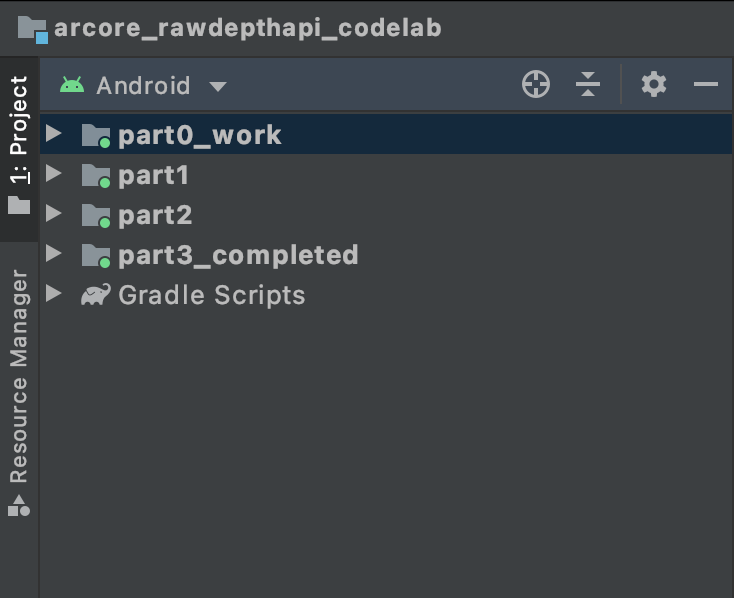
Trabajarás en el módulo part0_work. También te brindamos soluciones completas para cada parte del codelab. Cada módulo es una app que se puede compilar.
4. Ejecuta la app de partida
Sigue estos pasos para ejecutar la app de inicio de Raw Depth.
- Navega a Run > Run… > 'part0_work'.
- En el diálogo Select Deployment Target, selecciona tu dispositivo de la lista Connected Devices y haz clic en OK.
Android Studio compilará la app inicial y la ejecutará en tu dispositivo.
| Cuando ejecutes la app por primera vez, se te solicitará permiso para acceder a la cámara. Presiona Allow para continuar. |
| Actualmente, la app no hace nada.Esta es la aplicación de RA más básica, que muestra una vista de cámara de tu escena, pero no hace nada más.El código existente es similar a la muestra Hello AR publicada con el SDK de ARCore. |
A continuación, usarás la API de Raw Depth para recuperar la geometría de la escena que te rodea.
5. Configura la API de Raw Depth (parte 1)
Asegúrate de que el dispositivo objetivo admita la profundidad.
No todos los dispositivos compatibles con ARCore pueden ejecutar la API de Depth. Antes de agregar funcionalidad a tu app dentro de la función onResume() de RawDepthCodelabActivity.java, donde se crea una nueva sesión, asegúrate de que el dispositivo de destino admita la profundidad.
Busca el siguiente código existente:
// Create the ARCore session.
session = new Session(/* context= */ this);
Actualízalo para asegurarte de que la aplicación solo se ejecute en dispositivos que admitan la API de Depth.
// Create the ARCore session.
session = new Session(/* context= */ this);
if (!session.isDepthModeSupported(Config.DepthMode.RAW_DEPTH_ONLY)) {
message =
"This device does not support the ARCore Raw Depth API. See" +
"https://developers.google.com/ar/devices for
a list of devices that do.";
}
Cómo habilitar Raw Depth
La API de Raw Depth proporciona una imagen de profundidad sin suavizar y una imagen de confianza correspondiente que contiene la confianza de profundidad para cada píxel de la imagen de profundidad sin procesar. Habilita Raw Depth actualizando el siguiente código en la sentencia try-catch que acabas de modificar.
try {
// ************ New code to add ***************
// Enable raw depth estimation and auto focus mode while ARCore is running.
Config config = session.getConfig();
config.setDepthMode(Config.DepthMode.RAW_DEPTH_ONLY);
config.setFocusMode(Config.FocusMode.AUTO);
session.configure(config);
// ************ End new code to add ***************
session.resume();
} catch (CameraNotAvailableException e) {
messageSnackbarHelper.showError(this, "Camera not available. Try restarting the app.");
session = null;
return;
}
Ahora la sesión de RA se configuró correctamente y la app puede usar funciones basadas en profundidad.
Llama a la API de Depth
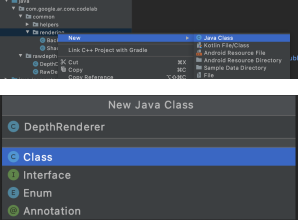
A continuación, llama a la API de Depth para recuperar imágenes de profundidad de cada fotograma. Crea un archivo nuevo para encapsular los datos de profundidad en una clase nueva. Haz clic con el botón derecho en la carpeta rawdepth y selecciona New > Java Class. Esto crea un archivo en blanco. Agrega lo siguiente a esta clase:
src/main/java/com/google/ar/core/codelab/rawdepth/DepthData.java
package com.google.ar.core.codelab.rawdepth;
import android.media.Image;
import android.opengl.Matrix;
import com.google.ar.core.Anchor;
import com.google.ar.core.CameraIntrinsics;
import com.google.ar.core.Frame;
import com.google.ar.core.exceptions.NotYetAvailableException;
import java.nio.ByteBuffer;
import java.nio.ByteOrder;
import java.nio.FloatBuffer;
import java.nio.ShortBuffer;
/**
* Convert depth data from ARCore depth images to 3D pointclouds. Points are added by calling the
* Raw Depth API, and reprojected into 3D space.
*/
public class DepthData {
public static final int FLOATS_PER_POINT = 4; // X,Y,Z,confidence.
}
Esta clase se usa para convertir imágenes de profundidad en nubes de puntos. Las nubes de puntos representan la geometría de la escena con una lista de puntos que tienen una coordenada 3D (x, y, z) y un valor de confianza en el rango de 0 a 1.
Agrega llamadas para propagar estos valores con la API de Raw Depth agregando un método create() en la parte inferior de la clase. Este método consulta las imágenes de profundidad y confianza más recientes, y almacena la nube de puntos resultante. Las imágenes de profundidad y confianza tendrán datos coincidentes.
public static FloatBuffer create(Frame frame, Anchor cameraPoseAnchor) {
try {
Image depthImage = frame.acquireRawDepthImage16Bits();
Image confidenceImage = frame.acquireRawDepthConfidenceImage();
// Retrieve the intrinsic camera parameters corresponding to the depth image to
// transform 2D depth pixels into 3D points. See more information about the depth values
// at
// https://developers.google.com/ar/develop/java/depth/overview#understand-depth-values.
final CameraIntrinsics intrinsics = frame.getCamera().getTextureIntrinsics();
float[] modelMatrix = new float[16];
cameraPoseAnchor.getPose().toMatrix(modelMatrix, 0);
final FloatBuffer points = convertRawDepthImagesTo3dPointBuffer(
depthImage, confidenceImage, intrinsics, modelMatrix);
depthImage.close();
confidenceImage.close();
return points;
} catch (NotYetAvailableException e) {
// This normally means that depth data is not available yet.
// This is normal, so you don't have to spam the logcat with this.
}
return null;
}
|
|
|
|
|
|
|
|


El código también almacena el anclaje de la cámara en este momento, de modo que la información de profundidad se pueda transformar en coordenadas mundiales llamando a un método auxiliar convertRawDepthImagesTo3dPointBuffer(). Este método auxiliar toma cada píxel de la imagen de profundidad y usa los parámetros intrínsecos de la cámara para desproyectar la profundidad en un punto 3D relativo a la cámara. Luego, se usa el anclaje de la cámara para convertir la posición del punto en coordenadas mundiales. Cada píxel existente se convierte en un punto 3D (en unidades de metros) y se almacena junto con su confianza.
Agrega el siguiente método auxiliar a DepthData.java:
/** Apply camera intrinsics to convert depth image into a 3D pointcloud. */
private static FloatBuffer convertRawDepthImagesTo3dPointBuffer(
Image depth, Image confidence, CameraIntrinsics cameraTextureIntrinsics, float[] modelMatrix) {
// Java uses big endian so change the endianness to ensure
// that the depth data is in the correct byte order.
final Image.Plane depthImagePlane = depth.getPlanes()[0];
ByteBuffer depthByteBufferOriginal = depthImagePlane.getBuffer();
ByteBuffer depthByteBuffer = ByteBuffer.allocate(depthByteBufferOriginal.capacity());
depthByteBuffer.order(ByteOrder.LITTLE_ENDIAN);
while (depthByteBufferOriginal.hasRemaining()) {
depthByteBuffer.put(depthByteBufferOriginal.get());
}
depthByteBuffer.rewind();
ShortBuffer depthBuffer = depthByteBuffer.asShortBuffer();
final Image.Plane confidenceImagePlane = confidence.getPlanes()[0];
ByteBuffer confidenceBufferOriginal = confidenceImagePlane.getBuffer();
ByteBuffer confidenceBuffer = ByteBuffer.allocate(confidenceBufferOriginal.capacity());
confidenceBuffer.order(ByteOrder.LITTLE_ENDIAN);
while (confidenceBufferOriginal.hasRemaining()) {
confidenceBuffer.put(confidenceBufferOriginal.get());
}
confidenceBuffer.rewind();
// To transform 2D depth pixels into 3D points, retrieve the intrinsic camera parameters
// corresponding to the depth image. See more information about the depth values at
// https://developers.google.com/ar/develop/java/depth/overview#understand-depth-values.
final int[] intrinsicsDimensions = cameraTextureIntrinsics.getImageDimensions();
final int depthWidth = depth.getWidth();
final int depthHeight = depth.getHeight();
final float fx =
cameraTextureIntrinsics.getFocalLength()[0] * depthWidth / intrinsicsDimensions[0];
final float fy =
cameraTextureIntrinsics.getFocalLength()[1] * depthHeight / intrinsicsDimensions[1];
final float cx =
cameraTextureIntrinsics.getPrincipalPoint()[0] * depthWidth / intrinsicsDimensions[0];
final float cy =
cameraTextureIntrinsics.getPrincipalPoint()[1] * depthHeight / intrinsicsDimensions[1];
// Allocate the destination point buffer. If the number of depth pixels is larger than
// `maxNumberOfPointsToRender` we uniformly subsample. The raw depth image may have
// different resolutions on different devices.
final float maxNumberOfPointsToRender = 20000;
int step = (int) Math.ceil(Math.sqrt(depthWidth * depthHeight / maxNumberOfPointsToRender));
FloatBuffer points = FloatBuffer.allocate(depthWidth / step * depthHeight / step * FLOATS_PER_POINT);
float[] pointCamera = new float[4];
float[] pointWorld = new float[4];
for (int y = 0; y < depthHeight; y += step) {
for (int x = 0; x < depthWidth; x += step) {
// Depth images are tightly packed, so it's OK to not use row and pixel strides.
int depthMillimeters = depthBuffer.get(y * depthWidth + x); // Depth image pixels are in mm.
if (depthMillimeters == 0) {
// Pixels with value zero are invalid, meaning depth estimates are missing from
// this location.
continue;
}
final float depthMeters = depthMillimeters / 1000.0f; // Depth image pixels are in mm.
// Retrieve the confidence value for this pixel.
final byte confidencePixelValue =
confidenceBuffer.get(
y * confidenceImagePlane.getRowStride()
+ x * confidenceImagePlane.getPixelStride());
final float confidenceNormalized = ((float) (confidencePixelValue & 0xff)) / 255.0f;
// Unproject the depth into a 3D point in camera coordinates.
pointCamera[0] = depthMeters * (x - cx) / fx;
pointCamera[1] = depthMeters * (cy - y) / fy;
pointCamera[2] = -depthMeters;
pointCamera[3] = 1;
// Apply model matrix to transform point into world coordinates.
Matrix.multiplyMV(pointWorld, 0, modelMatrix, 0, pointCamera, 0);
points.put(pointWorld[0]); // X.
points.put(pointWorld[1]); // Y.
points.put(pointWorld[2]); // Z.
points.put(confidenceNormalized);
}
}
points.rewind();
return points;
}
Obtén los datos de Raw Depth más recientes para cada fotograma
Modifica la app para recuperar información de profundidad y alinearla con las coordenadas mundiales de cada postura.
En RawDepthCodelabActivity.java, en el método onDrawFrame(), busca las líneas existentes:
Frame frame = session.update();
Camera camera = frame.getCamera();
// If the frame is ready, render the camera preview image to the GL surface.
backgroundRenderer.draw(frame);
Agrega las siguientes líneas justo debajo:
// Retrieve the depth data for this frame.
FloatBuffer points = DepthData.create(frame, session.createAnchor(camera.getPose()));
if (points == null) {
return;
}
if (messageSnackbarHelper.isShowing() && points != null) {
messageSnackbarHelper.hide(this);
}
6. Renderiza los datos de profundidad (parte 2)
Ahora que tienes una nube de puntos de profundidad con la que puedes experimentar, es hora de ver cómo se ven los datos renderizados en la pantalla.
Agrega un renderizador para visualizar los puntos de profundidad
Agrega un renderizador para visualizar los puntos de profundidad.
Primero, agrega una clase nueva para que contenga la lógica de renderización. Esta clase realiza las operaciones de OpenGL para inicializar sombreadores y visualizar la nube de puntos de profundidad.
| Agrega la clase DepthRenderer
|
Propaga esta clase con el siguiente código:
src/main/java/com/google/ar/core/codelab/common/rendering/DepthRenderer.java
package com.google.ar.core.codelab.common.rendering;
import android.content.Context;
import android.opengl.GLES20;
import android.opengl.Matrix;
import com.google.ar.core.Camera;
import com.google.ar.core.codelab.rawdepth.DepthData;
import java.io.IOException;
import java.nio.FloatBuffer;
public class DepthRenderer {
private static final String TAG = DepthRenderer.class.getSimpleName();
// Shader names.
private static final String VERTEX_SHADER_NAME = "shaders/depth_point_cloud.vert";
private static final String FRAGMENT_SHADER_NAME = "shaders/depth_point_cloud.frag";
public static final int BYTES_PER_FLOAT = Float.SIZE / 8;
private static final int BYTES_PER_POINT = BYTES_PER_FLOAT * DepthData.FLOATS_PER_POINT;
private static final int INITIAL_BUFFER_POINTS = 1000;
private int arrayBuffer;
private int arrayBufferSize;
private int programName;
private int positionAttribute;
private int modelViewProjectionUniform;
private int pointSizeUniform;
private int numPoints = 0;
public DepthRenderer() {}
public void createOnGlThread(Context context) throws IOException {
ShaderUtil.checkGLError(TAG, "Bind");
int[] buffers = new int[1];
GLES20.glGenBuffers(1, buffers, 0);
arrayBuffer = buffers[0];
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, arrayBuffer);
arrayBufferSize = INITIAL_BUFFER_POINTS * BYTES_PER_POINT;
GLES20.glBufferData(GLES20.GL_ARRAY_BUFFER, arrayBufferSize, null, GLES20.GL_DYNAMIC_DRAW);
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, 0);
ShaderUtil.checkGLError(TAG, "Create");
int vertexShader =
ShaderUtil.loadGLShader(TAG, context, GLES20.GL_VERTEX_SHADER, VERTEX_SHADER_NAME);
int fragmentShader =
ShaderUtil.loadGLShader(TAG, context, GLES20.GL_FRAGMENT_SHADER, FRAGMENT_SHADER_NAME);
programName = GLES20.glCreateProgram();
GLES20.glAttachShader(programName, vertexShader);
GLES20.glAttachShader(programName, fragmentShader);
GLES20.glLinkProgram(programName);
GLES20.glUseProgram(programName);
ShaderUtil.checkGLError(TAG, "Program");
positionAttribute = GLES20.glGetAttribLocation(programName, "a_Position");
modelViewProjectionUniform = GLES20.glGetUniformLocation(programName, "u_ModelViewProjection");
// Sets the point size, in pixels.
pointSizeUniform = GLES20.glGetUniformLocation(programName, "u_PointSize");
ShaderUtil.checkGLError(TAG, "Init complete");
}
}
Renderiza los datos de profundidad
A continuación, proporciona el código fuente de los sombreadores de renderización. Agrega el siguiente método update() en la parte inferior de la clase DepthRenderer. Este método toma la información de profundidad más reciente como entrada y copia los datos de la nube de puntos en la GPU.
/**
* Update the OpenGL buffer contents to the provided point. Repeated calls with the same point
* cloud will be ignored.
*/
public void update(FloatBuffer points) {
ShaderUtil.checkGLError(TAG, "Update");
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, arrayBuffer);
// If the array buffer is not large enough to fit the new point cloud, resize it.
points.rewind();
numPoints = points.remaining() / DepthData.FLOATS_PER_POINT;
if (numPoints * BYTES_PER_POINT > arrayBufferSize) {
while (numPoints * BYTES_PER_POINT > arrayBufferSize) {
arrayBufferSize *= 2;
}
GLES20.glBufferData(GLES20.GL_ARRAY_BUFFER, arrayBufferSize, null, GLES20.GL_DYNAMIC_DRAW);
}
GLES20.glBufferSubData(
GLES20.GL_ARRAY_BUFFER, 0, numPoints * BYTES_PER_POINT, points);
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, 0);
ShaderUtil.checkGLError(TAG, "Update complete");
}
Agrega un método draw() en la parte inferior de la clase DepthRenderer para dibujar los datos más recientes en la pantalla. Este método toma la información de la nube de puntos en 3D y la proyecta de nuevo en la vista de la cámara para que se pueda renderizar en la pantalla.
/** Render the point cloud. The ARCore point cloud is given in world space. */
public void draw(Camera camera) {
float[] projectionMatrix = new float[16];
camera.getProjectionMatrix(projectionMatrix, 0, 0.1f, 100.0f);
float[] viewMatrix = new float[16];
camera.getViewMatrix(viewMatrix, 0);
float[] viewProjection = new float[16];
Matrix.multiplyMM(viewProjection, 0, projectionMatrix, 0, viewMatrix, 0);
ShaderUtil.checkGLError(TAG, "Draw");
GLES20.glUseProgram(programName);
GLES20.glEnableVertexAttribArray(positionAttribute);
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, arrayBuffer);
GLES20.glVertexAttribPointer(positionAttribute, 4, GLES20.GL_FLOAT, false, BYTES_PER_POINT, 0);
GLES20.glUniformMatrix4fv(modelViewProjectionUniform, 1, false, viewProjection, 0);
// Set point size to 5 pixels.
GLES20.glUniform1f(pointSizeUniform, 5.0f);
GLES20.glDrawArrays(GLES20.GL_POINTS, 0, numPoints);
GLES20.glDisableVertexAttribArray(positionAttribute);
GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, 0);
ShaderUtil.checkGLError(TAG, "Draw complete");
}
Puedes establecer el tamaño del punto en diferentes tamaños,en píxeles, con la variable pointSizeUniform. pointSizeUniform se establece en 5 píxeles en la app de ejemplo.
Cómo agregar sombreadores nuevos
Hay muchas formas de ver la profundidad y mostrar los datos de profundidad en tu app. Aquí, agregarás algunos sombreadores y crearás una visualización simple de asignación de color.
Agrega nuevos sombreadores .vert y .frag en el directorio src/main/assets/shaders/.
| Cómo agregar un sombreador .vert nuevoEn Android Studio:
|

En el nuevo archivo .vert, agrega el siguiente código:
src/main/assets/shaders/depth_point_cloud.vert
uniform mat4 u_ModelViewProjection;
uniform float u_PointSize;
attribute vec4 a_Position;
varying vec4 v_Color;
// Return an interpolated color in a 6 degree polynomial interpolation.
vec3 GetPolynomialColor(in float x,
in vec4 kRedVec4, in vec4 kGreenVec4, in vec4 kBlueVec4,
in vec2 kRedVec2, in vec2 kGreenVec2, in vec2 kBlueVec2) {
// Moves the color space a little bit to avoid pure red.
// Removes this line for more contrast.
x = clamp(x * 0.9 + 0.03, 0.0, 1.0);
vec4 v4 = vec4(1.0, x, x * x, x * x * x);
vec2 v2 = v4.zw * v4.z;
return vec3(
dot(v4, kRedVec4) + dot(v2, kRedVec2),
dot(v4, kGreenVec4) + dot(v2, kGreenVec2),
dot(v4, kBlueVec4) + dot(v2, kBlueVec2)
);
}
// Return a smooth Percept colormap based upon the Turbo colormap.
vec3 PerceptColormap(in float x) {
const vec4 kRedVec4 = vec4(0.55305649, 3.00913185, -5.46192616, -11.11819092);
const vec4 kGreenVec4 = vec4(0.16207513, 0.17712472, 15.24091500, -36.50657960);
const vec4 kBlueVec4 = vec4(-0.05195877, 5.18000081, -30.94853351, 81.96403246);
const vec2 kRedVec2 = vec2(27.81927491, -14.87899417);
const vec2 kGreenVec2 = vec2(25.95549545, -5.02738237);
const vec2 kBlueVec2 = vec2(-86.53476570, 30.23299484);
const float kInvalidDepthThreshold = 0.01;
return step(kInvalidDepthThreshold, x) *
GetPolynomialColor(x, kRedVec4, kGreenVec4, kBlueVec4,
kRedVec2, kGreenVec2, kBlueVec2);
}
void main() {
// Color the pointcloud by height.
float kMinHeightMeters = -2.0f;
float kMaxHeightMeters = 2.0f;
float normalizedHeight = clamp((a_Position.y - kMinHeightMeters) / (kMaxHeightMeters - kMinHeightMeters), 0.0, 1.0);
v_Color = vec4(PerceptColormap(normalizedHeight), 1.0);
gl_Position = u_ModelViewProjection * vec4(a_Position.xyz, 1.0);
gl_PointSize = u_PointSize;
}
Este sombreador usa el mapa de colores Turbo para lograr una mejor visualización. Realiza los siguientes pasos:
- Recupera la elevación de cada punto (eje Y en coordenadas mundiales).
- Calcula un color asociado a esa elevación (rojo=baja, azul=alta).
- Calcula la posición en la pantalla de cada punto.
- Establece el tamaño (en píxeles) de cada punto, como se define en el método
DepthRenderer.update().
Crea un sombreador de fragmentos en el mismo directorio y asígnale el nombre depth_point_cloud.frag. Para ello, repite los mismos pasos de esta sección.
Luego, agrega el siguiente código a este archivo nuevo para renderizar cada punto como un solo vértice de color uniforme, como se define en el sombreador de vértices.
src/main/assets/shaders/depth_point_cloud.frag
precision mediump float;
varying vec4 v_Color;
void main() {
gl_FragColor = v_Color;
}
Para aplicar esta renderización, agrega llamadas a la clase DepthRenderer dentro de tu RawDepthCodelabActivity.
src/main/java/com/google/ar/core/codelab/common/rendering/RawDepthCodelabActivity.java
import com.google.ar.core.codelab.common.rendering.DepthRenderer;
En la parte superior de la clase, agrega un miembro privado junto a backgroundRenderer.
private final DepthRenderer depthRenderer = new DepthRenderer();
El depthRenderer debe inicializarse dentro de RawDepthCodelabActivity.onSurfaceCreated(), al igual que el backgroundRenderer existente.
depthRenderer.createOnGlThread(/*context=*/ this);
Agrega el siguiente código al final del bloque try-catch dentro de onDrawFrame para mostrar la profundidad más reciente del fotograma actual.
// Visualize depth points.
depthRenderer.update(points);
depthRenderer.draw(camera);
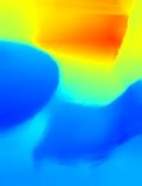
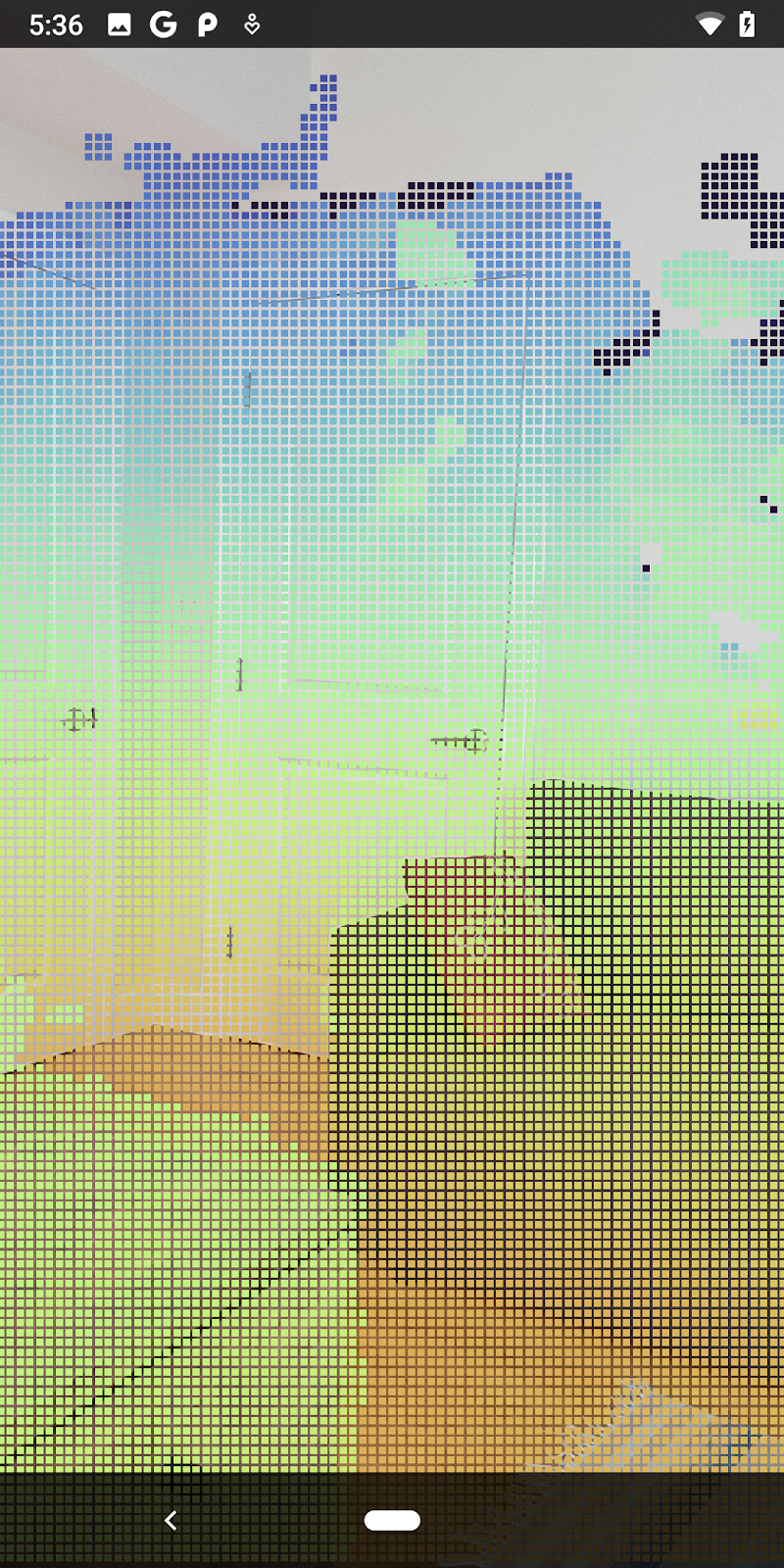
Con estos cambios, la app ahora debería compilarse correctamente y mostrar la nube de puntos de profundidad.
| Ejemplo de visualización de una nube de puntos de profundidad sin procesar
|

7. Analiza nubes de puntos 3D (parte 3)
Puedes analizar los datos de profundidad una vez que verifiques que existen en una sesión de RA. Una herramienta importante para analizar la profundidad es el valor de confianza de cada píxel. Usa valores de confianza para analizar nubes de puntos 3D.
Invalida los píxeles con un nivel de confianza bajo
Recuperaste el valor de confianza para cada píxel de profundidad y lo guardaste junto con cada punto dentro de DepthData, pero aún no lo usaste.
Los valores de confidenceNormalized varían de 0 a 1, donde 0 indica una confianza baja y 1 indica una confianza total. Modifica el método convertRawDepthImagesTo3dPointBuffer() en la clase DepthData para evitar guardar píxeles cuya confianza sea demasiado baja como para ser útiles.
final float confidenceNormalized = ((float) (confidencePixelValue & 0xff)) / 255.0f;
// ******** New code to add ************
if (confidenceNormalized < 0.3) {
// Ignores "low-confidence" pixels.
continue;
}
// ******** End of new code to add *********
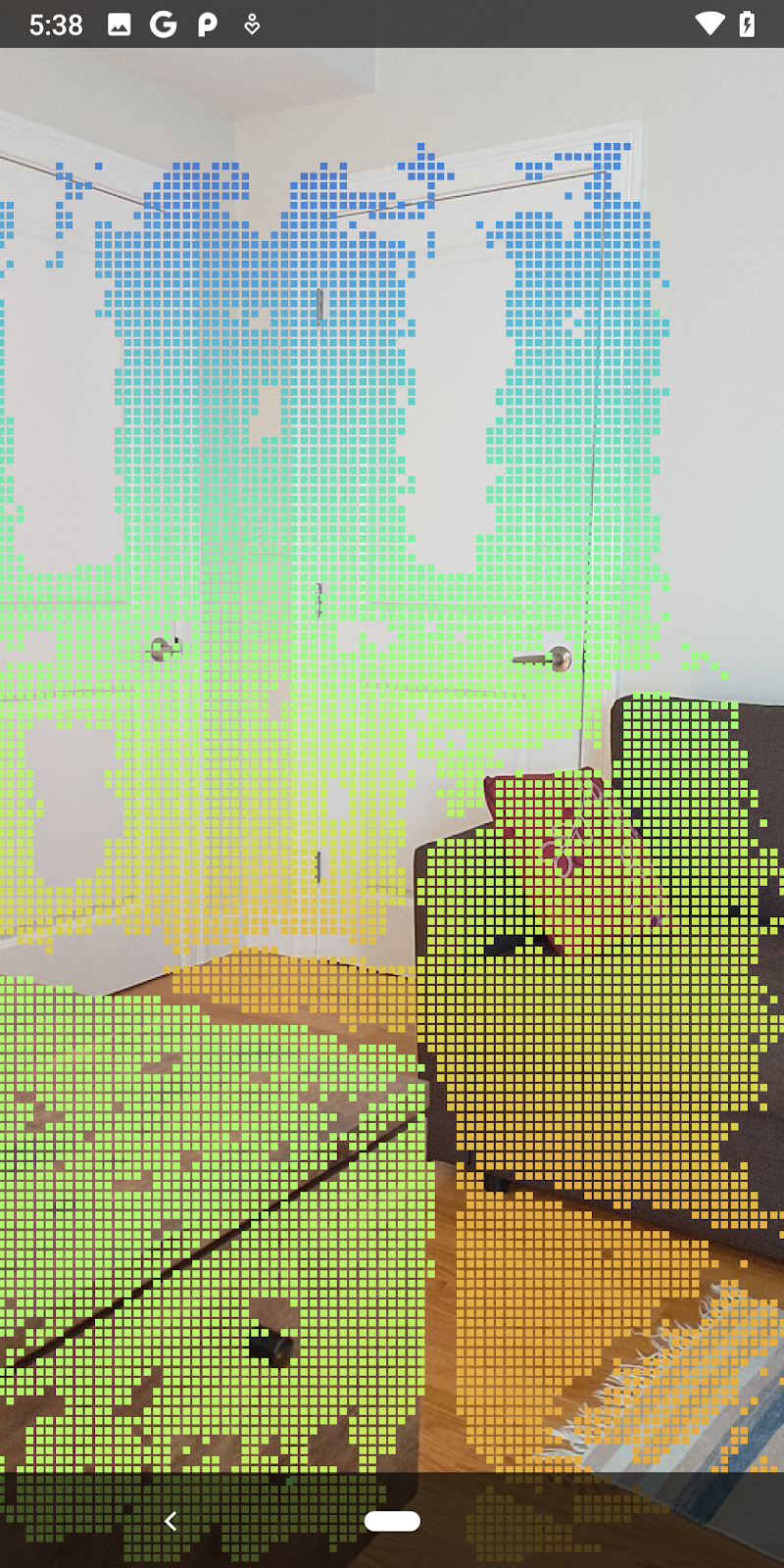
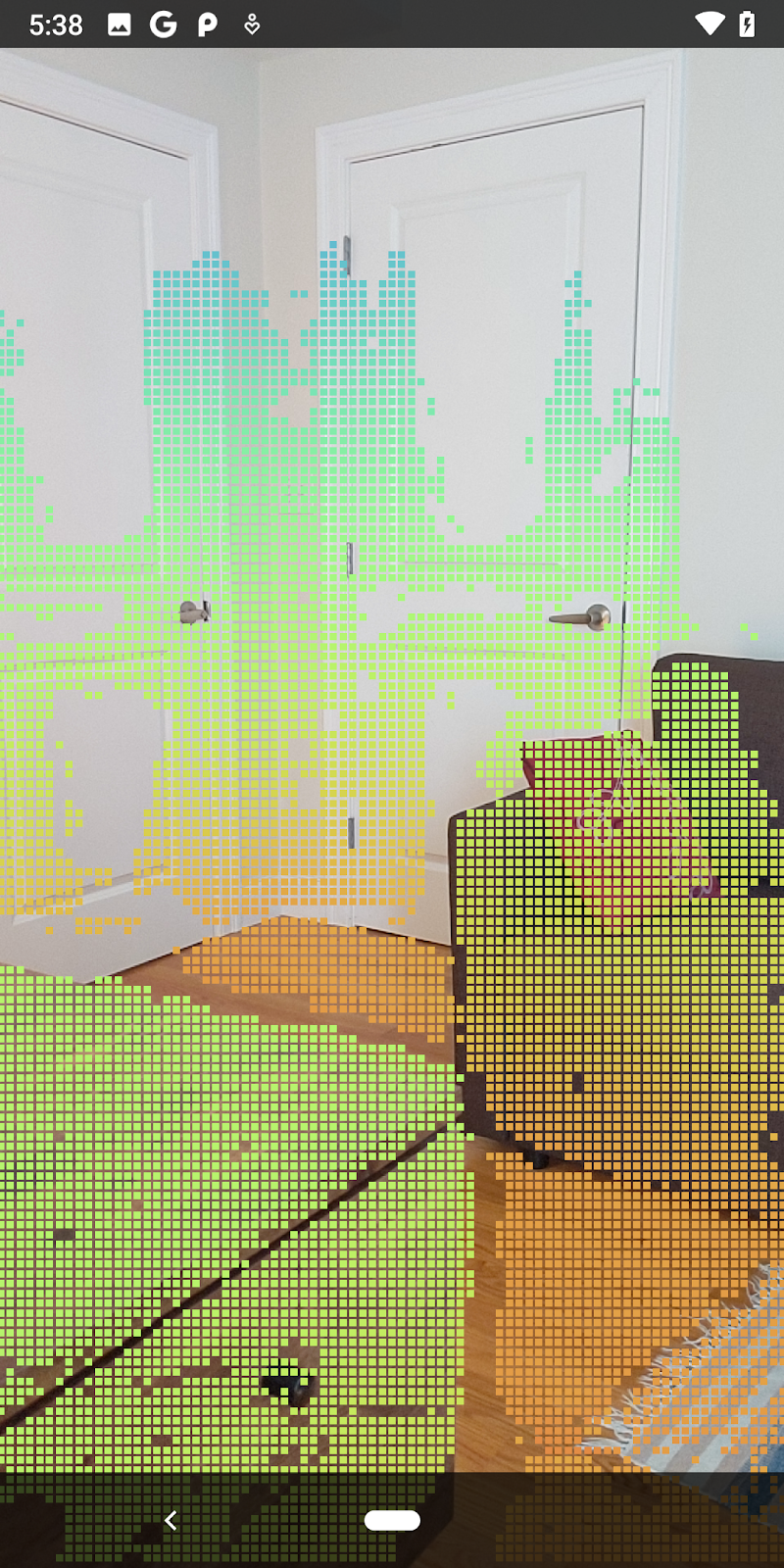
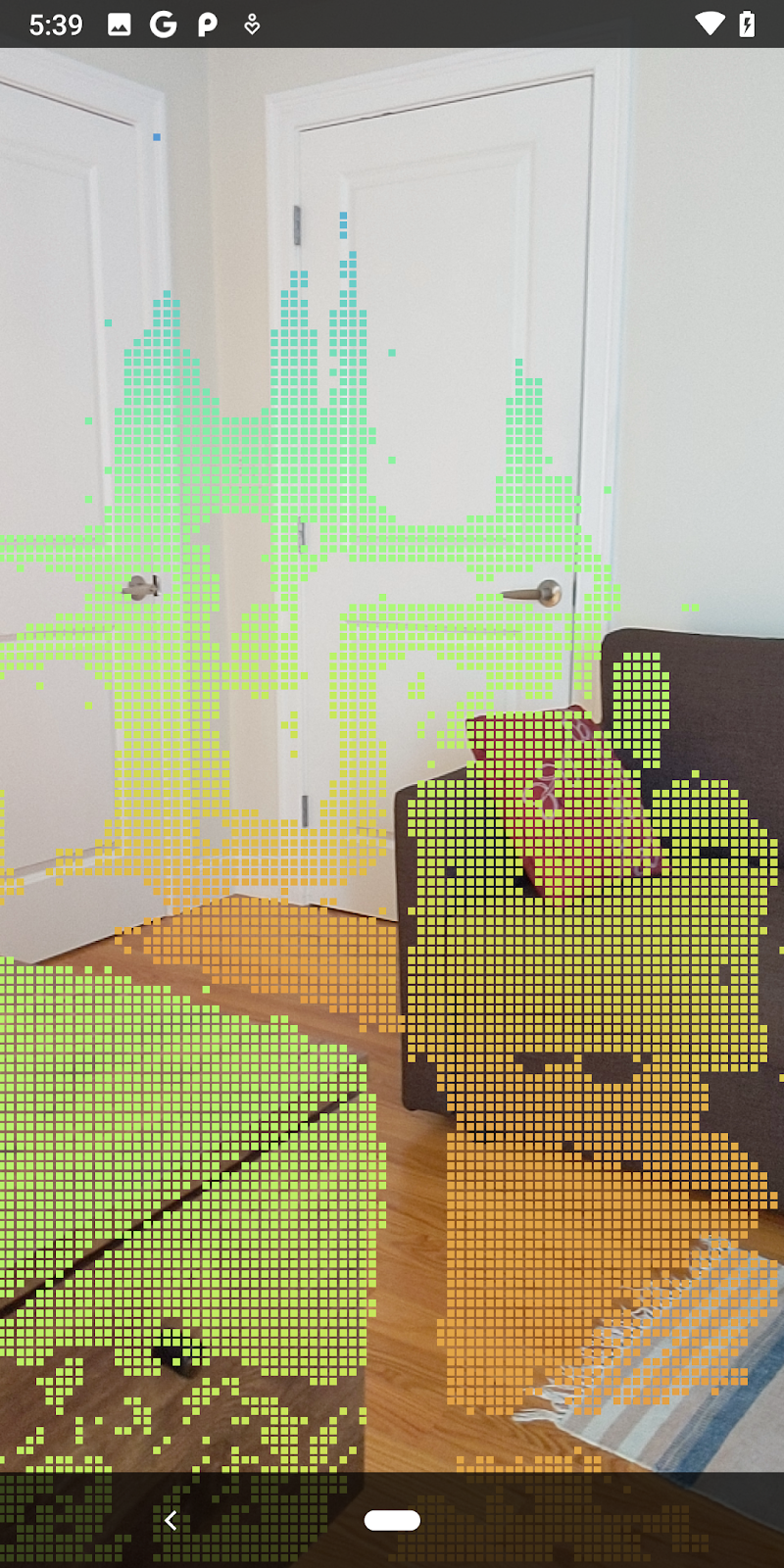
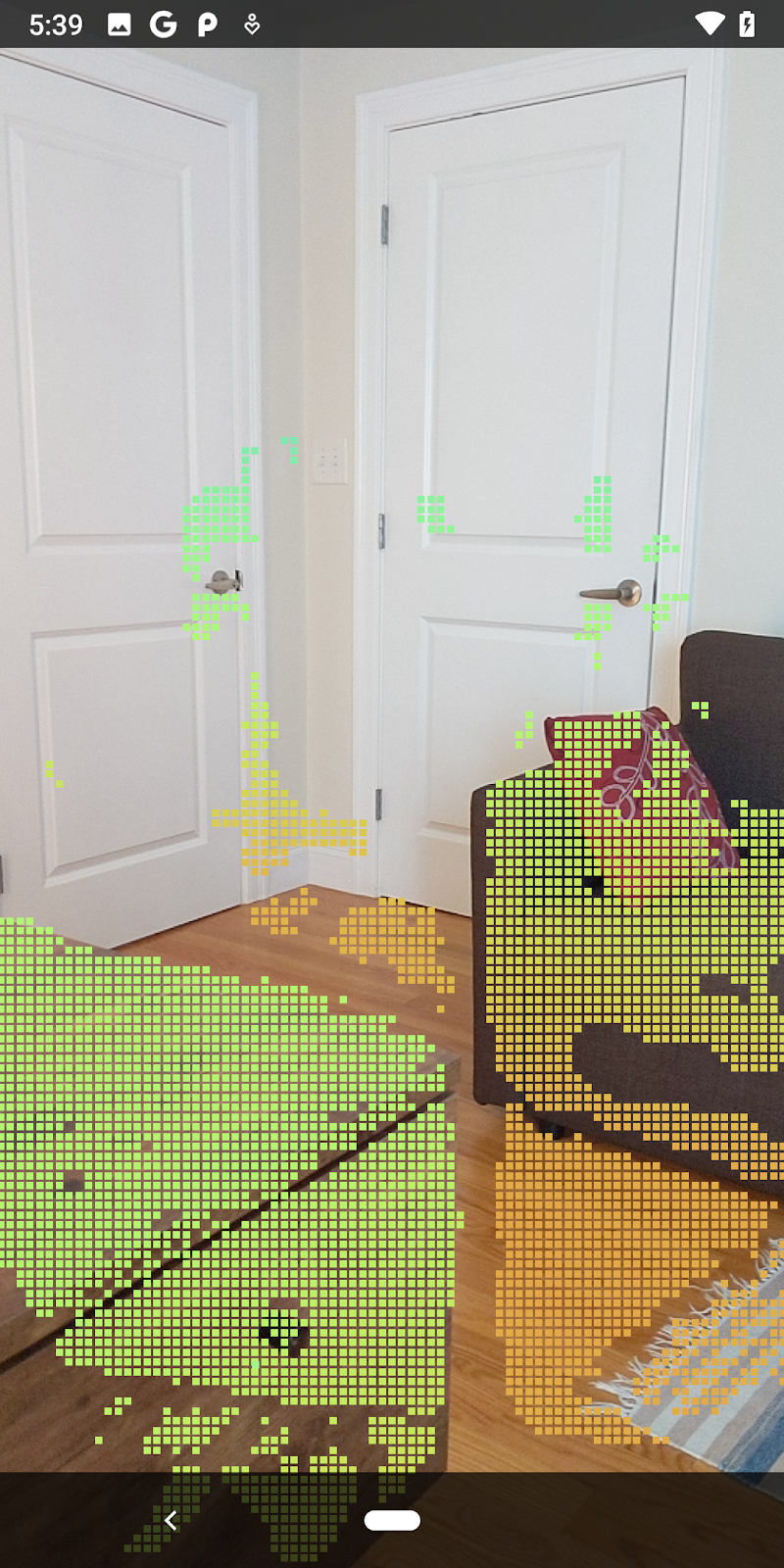
Prueba diferentes umbrales para el nivel de confianza y observa cuántos puntos de profundidad se conservan en cada nivel.
|
|
|
|
|
Confianza >= 0.1 | Confianza >= 0.3 | Confianza >= 0.5 | Confianza >= 0.7 | Confianza >= 0.9 |
Filtrar píxeles por distancia
También puedes filtrar los píxeles de profundidad por distancia. Estos próximos pasos se relacionan con la geometría cercana a la cámara. Para optimizar el rendimiento, puedes ignorar los puntos que estén demasiado lejos.
Actualiza el código de verificación de confianza que acabas de agregar con lo siguiente:
src/main/java/com/google/ar/core/codelab/rawdepth/DepthData.java
if (confidenceNormalized < 0.3 || depthMeters > 1.5) {
// Ignore "low-confidence" pixels or depth that is too far away.
continue;
}
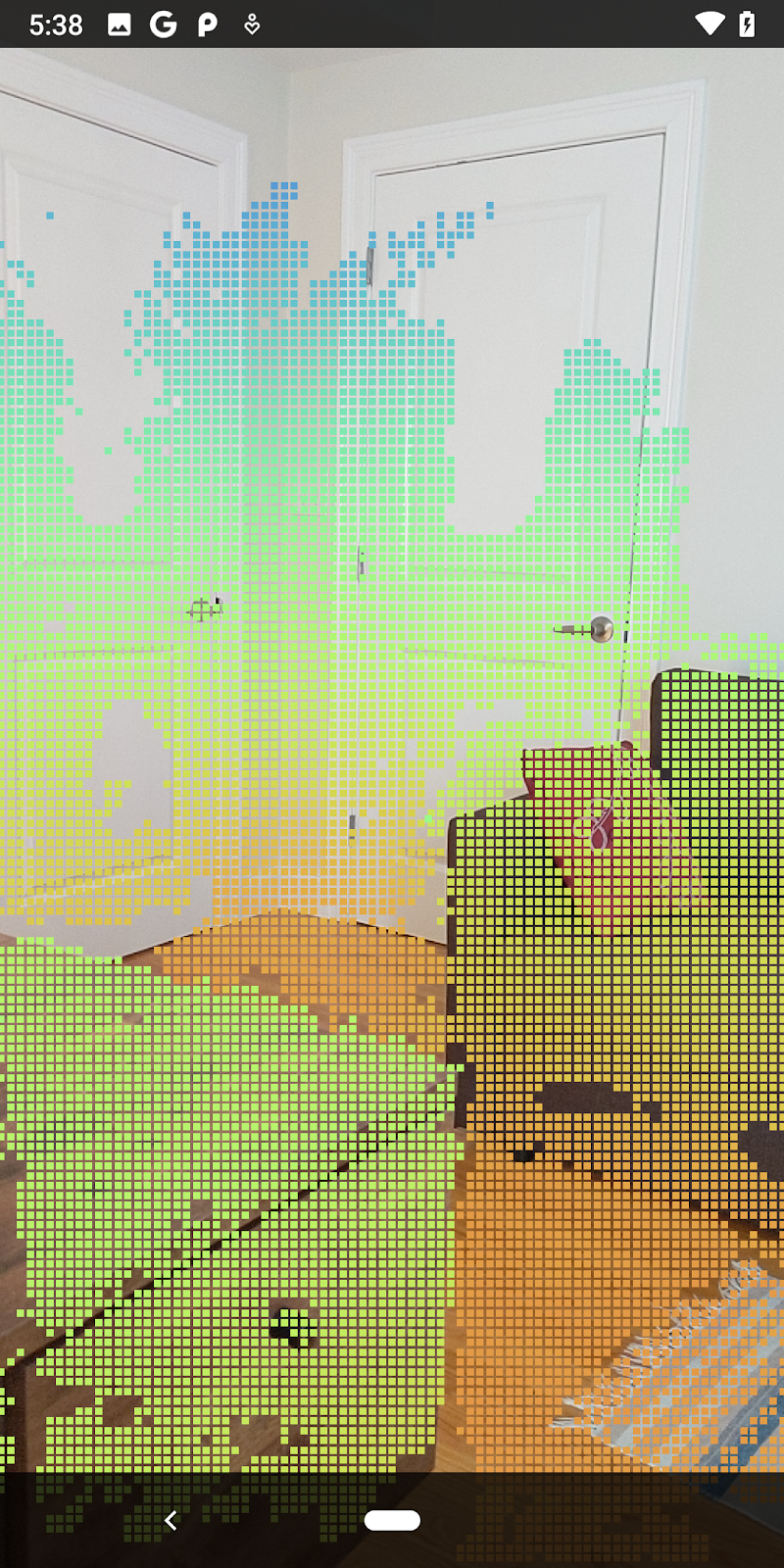
Ahora solo verás los puntos cercanos y de alta confianza.
| Filtrado por distanciaLimita la nube de puntos a 1.5 metros de la cámara. |
Comparar puntos y planos en 3D
Puedes comparar los puntos y planos de la geometría 3D y usarlos para filtrarse entre sí, por ejemplo, quitar los puntos que están cerca de los planos de RA observados.
En este paso, solo quedarán los puntos "no planos", que tienden a representar superficies en los objetos del entorno. Agrega el método filterUsingPlanes() a la parte inferior de la clase DepthData. Este método itera a través de los puntos existentes, verifica cada punto con cada plano y anula cualquier punto que esté demasiado cerca de un plano de RA, lo que deja áreas no planas que destacan objetos en la escena.
src/main/java/com/google/ar/core/codelab/rawdepth/DepthData.java
public static void filterUsingPlanes(FloatBuffer points, Collection<Plane> allPlanes) {
float[] planeNormal = new float[3];
// Allocate the output buffer.
int numPoints = points.remaining() / DepthData.FLOATS_PER_POINT;
// Check each plane against each point.
for (Plane plane : allPlanes) {
if (plane.getTrackingState() != TrackingState.TRACKING || plane.getSubsumedBy() != null) {
continue;
}
// Compute the normal vector of the plane.
Pose planePose = plane.getCenterPose();
planePose.getTransformedAxis(1, 1.0f, planeNormal, 0);
// Filter points that are too close to the plane.
for (int index = 0; index < numPoints; ++index) {
// Retrieves the next point.
final float x = points.get(FLOATS_PER_POINT * index);
final float y = points.get(FLOATS_PER_POINT * index + 1);
final float z = points.get(FLOATS_PER_POINT * index + 2);
// Transform point to be in world coordinates, to match plane info.
float distance = (x - planePose.tx()) * planeNormal[0]
+ (y - planePose.ty()) * planeNormal[1]
+ (z - planePose.tz()) * planeNormal[2];
// Controls the size of objects detected.
// Smaller values mean smaller objects will be kept.
// Larger values will only allow detection of larger objects, but also helps reduce noise.
if (Math.abs(distance) > 0.03) {
continue; // Keep this point, since it's far enough away from the plane.
}
// Invalidate points that are too close to planar surfaces.
points.put(FLOATS_PER_POINT * index, 0);
points.put(FLOATS_PER_POINT * index + 1, 0);
points.put(FLOATS_PER_POINT * index + 2, 0);
points.put(FLOATS_PER_POINT * index + 3, 0);
}
}
}
Puedes agregar este método a RawDepthCodelabActivity en el método onDrawFrame:
// ********** New code to add ************
// Filter the depth data.
DepthData.filterUsingPlanes(points, session.getAllTrackables(Plane.class));
// ********** End new code to add *******
// Visualize depth points.
depthRenderer.update(points);
depthRenderer.draw(camera);
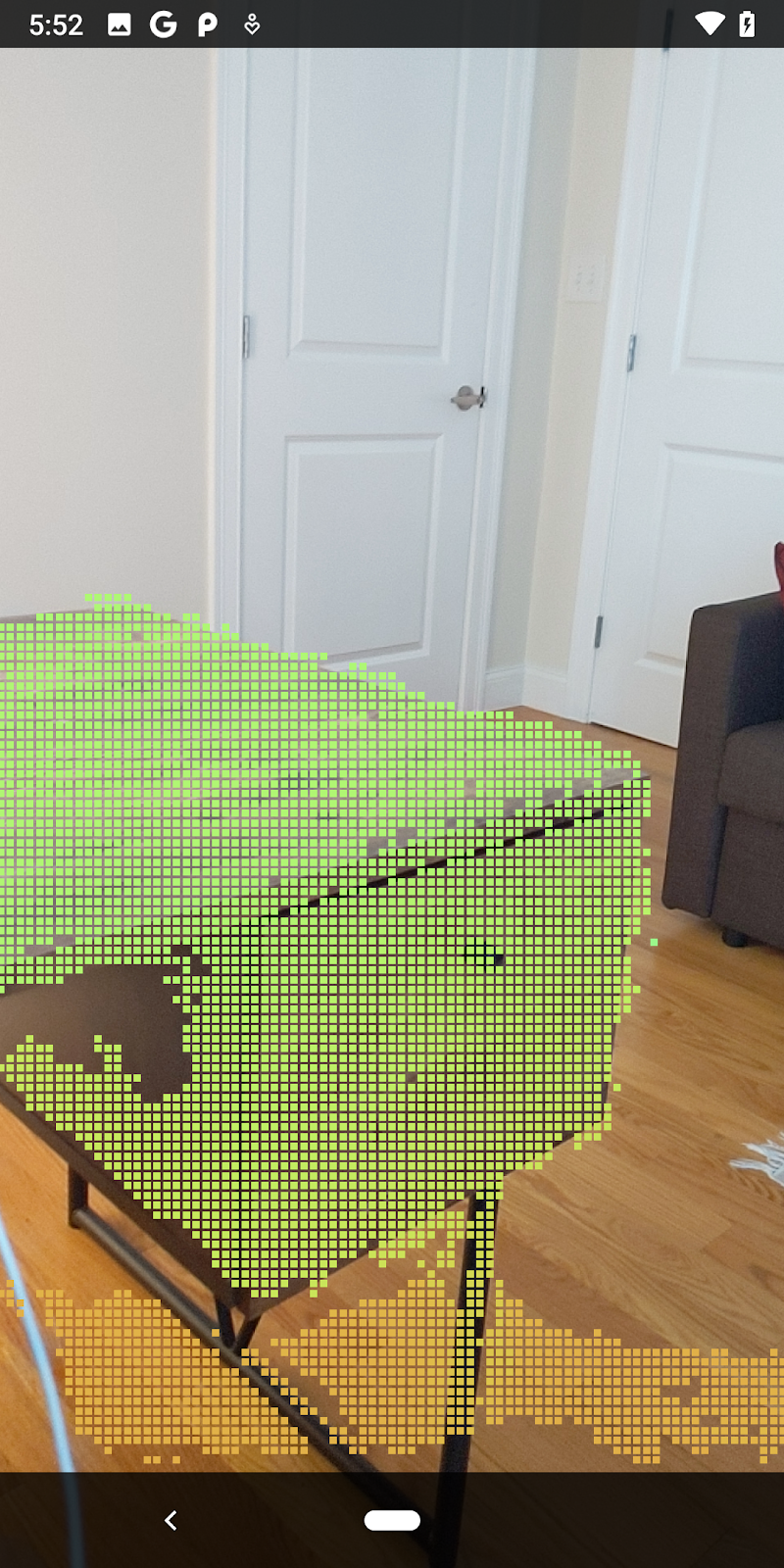
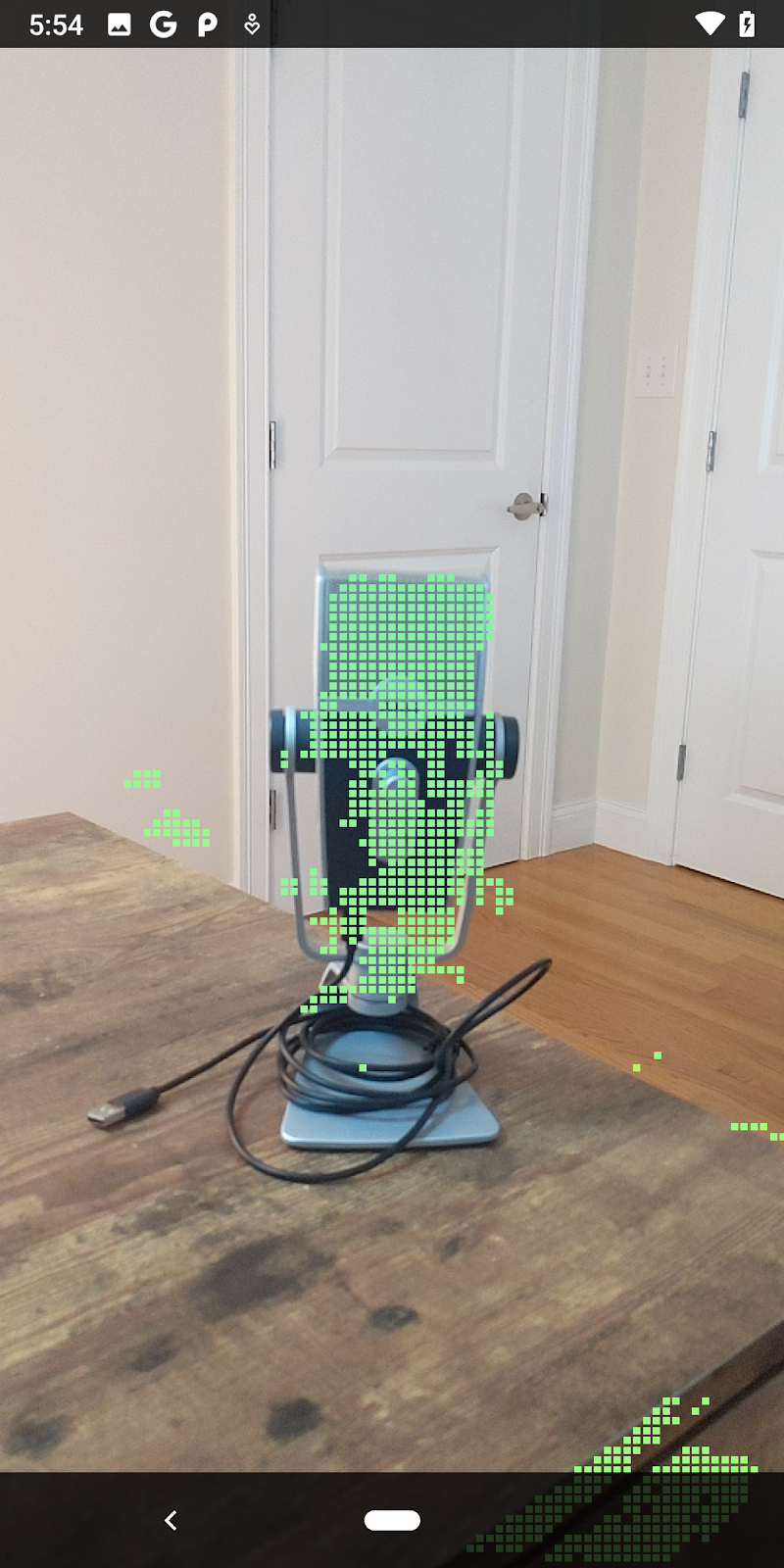
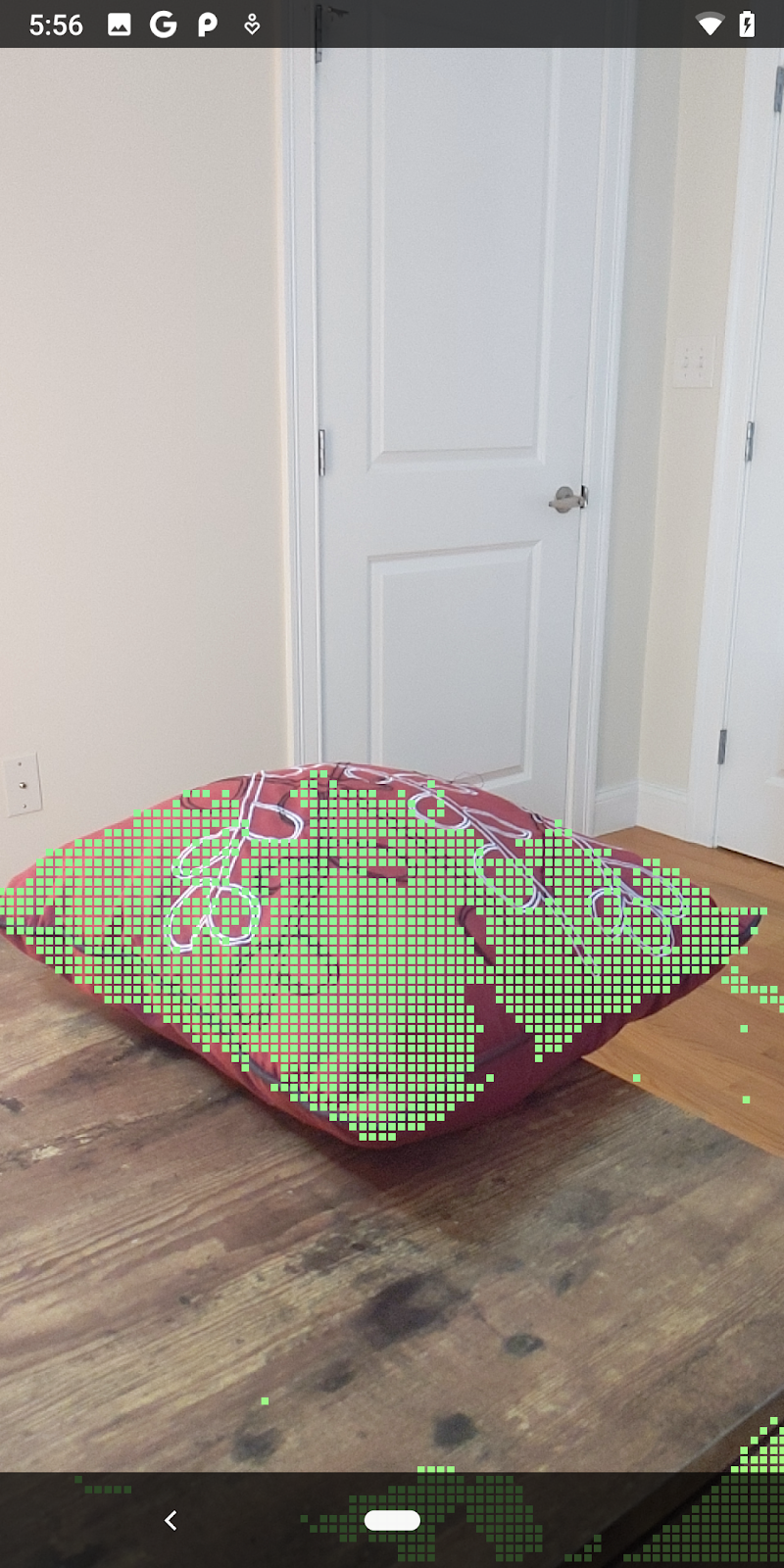
Si ejecutas el codelab ahora, se renderizará un subconjunto de puntos. Estos puntos representan los objetos de la escena, sin tener en cuenta las superficies planas sobre las que se apoyan los objetos. Puedes usar estos datos para estimar el tamaño y la posición de los objetos agrupando los puntos.
|
|
|
|
Taza de té | Micrófono | Auriculares | Pillow |


Agrupación de puntos
Este codelab contiene un algoritmo de agrupamiento de nubes de puntos muy simple. Actualiza el codelab para agrupar las nubes de puntos recuperadas en clústeres definidos por cuadros delimitadores alineados con el eje.
src/main/java/com/google/ar/core/codelab/rawdepth/RawDepthCodelabActivity.java
import com.google.ar.core.codelab.common.helpers.AABB;
import com.google.ar.core.codelab.common.helpers.PointClusteringHelper;
import com.google.ar.core.codelab.common.rendering.BoxRenderer;
import java.util.List;
Agrega un BoxRenderer a esta clase en la parte superior del archivo, con los otros renderizadores.
private final BoxRenderer boxRenderer = new BoxRenderer();
Dentro del método onSurfaceCreated(), agrega lo siguiente junto con los otros renderizadores:
boxRenderer.createOnGlThread(/*context=*/this);
Por último, agrega las siguientes líneas a onDrawFrame() dentro de RawDepthCodelabActivity para agrupar las nubes de puntos recuperadas en clústeres y renderizar los resultados como cuadros delimitadores alineados con el eje.
// Visualize depth points.
depthRenderer.update(points);
depthRenderer.draw(camera);
// ************ New code to add ***************
// Draw boxes around clusters of points.
PointClusteringHelper clusteringHelper = new PointClusteringHelper(points);
List<AABB> clusters = clusteringHelper.findClusters();
for (AABB aabb : clusters) {
boxRenderer.draw(aabb, camera);
}
// ************ End new code to add ***************
|
|
|
|
Taza de té | Micrófono | Auriculares | Pillow |



Ahora puedes recuperar la profundidad sin procesar a través de una sesión de ARCore, convertir la información de profundidad en nubes de puntos 3D y realizar operaciones básicas de filtrado y renderización en esos puntos.
8. Crea, ejecuta y realiza pruebas
Compila, ejecuta y prueba tu app.
Compila y ejecuta tu app
Para compilar y ejecutar tu app, sigue estos pasos:
- Conecta un dispositivo compatible con ARCore a través de USB.
- Ejecuta tu proyecto con el botón ► en la barra de menú.
- Espera a que la app se compile y se implemente en el dispositivo.
La primera vez que intentes implementar la app en tu dispositivo, deberás
Permitir depuración por USB
en el dispositivo. Selecciona Aceptar para continuar.
La primera vez que ejecutes la app en el dispositivo, se te preguntará si tiene permiso para usar la cámara. Debes permitir ese acceso para seguir usando la funcionalidad de RA.
Cómo probar la app
Si ejecutas la app, puedes probar su comportamiento básico. Para ello, sostén el dispositivo, muévete por el lugar y escanea lentamente el área. Procura obtener al menos 10 segundos de datos y examina el área desde distintas direcciones antes de avanzar al siguiente paso.
9. Felicitaciones
¡Felicitaciones! Creaste y ejecutaste con éxito tu primera app de realidad aumentada basada en profundidad con la API de Raw Depth de ARCore de Google. ¡Tenemos muchas ganas de ver lo que crearás!
10. Solución de problemas
Cómo configurar un dispositivo Android para el desarrollo
- Conecta el dispositivo a la máquina de desarrollo con un cable USB. Si desarrollas la app en Windows, es posible que debas instalar el controlador USB adecuado para tu dispositivo.
- Completa los siguientes pasos a fin de habilitar la depuración por USB en la ventana Opciones para desarrolladores:
- Abre la app de Configuración.
- Si tu dispositivo usa Android 8.0 o una versión posterior, selecciona Sistema.
- Desplázate hasta la parte inferior y selecciona Acerca del teléfono.
- Desplázate hasta la parte inferior y presiona el Número de compilación siete veces.
- Regresa a la pantalla anterior, desplázate hasta la parte inferior y presiona Opciones para desarrolladores.
- En la ventana Opciones para desarrolladores, desplázate hacia abajo para buscar y habilitar la depuración por USB.
Obtén información más detallada sobre este proceso en el sitio web para desarrolladores de Android de Google.
Errores de compilación relacionados con licencias
Si se produce un error de compilación relacionado con licencias (Failed to install the following Android SDK packages as some licences have not been accepted), usa los siguientes comandos para revisar y aceptar las licencias:
cd <path to Android SDK>
tools/bin/sdkmanager --licenses