
1. Wprowadzenie
Co utworzysz
W tym ćwiczeniu nauczymy się używać TensorFlow Lite For Microcontrollers do uruchamiania modelu deep learning na płytce deweloperskiej SparkFun Edge. Będziemy korzystać z wbudowanego w płytkę modelu wykrywania mowy, który używa konwolucyjnej sieci neuronowej do wykrywania słów „tak” i „nie” wypowiadanych przez 2 mikrofony płytki.
Uczenie maszynowe na mikrokontrolerach
Systemy uczące się mogą być wykorzystywane do tworzenia inteligentnych narzędzi, które ułatwiają użytkownikom życie, takich jak Asystent Google. Często jednak wymagają one dużej mocy obliczeniowej lub zasobów, takich jak wydajny serwer w chmurze lub komputer stacjonarny. Obecnie jednak wnioskowanie uczenia maszynowego można przeprowadzać na małych urządzeniach o niskim poborze mocy, takich jak mikrokontrolery.
Mikrokontrolery są bardzo popularne, tanie, wymagają bardzo mało energii i są bardzo niezawodne. Są one częścią różnego rodzaju urządzeń domowych, takich jak sprzęt AGD, samochody i zabawki. Każdego roku produkuje się około 30 miliardów urządzeń z mikrokontrolerami.

Dzięki zastosowaniu uczenia maszynowego w przypadku małych mikrokontrolerów możemy zwiększyć inteligencję miliardów urządzeń, których używamy w życiu codziennym, bez konieczności korzystania z drogiego sprzętu czy niezawodnych połączeń internetowych. Wyobraź sobie inteligentne urządzenia, które dostosowują się do Twojej codziennej rutyny, inteligentne czujniki przemysłowe, które odróżniają problemy od normalnej pracy, oraz magiczne zabawki, które pomagają dzieciom uczyć się w zabawny i przyjemny sposób.
TensorFlow Lite For Microcontrollers (oprogramowanie)
TensorFlow to platforma uczenia maszynowego typu open source od Google, która służy do trenowania i uruchamiania modeli. TensorFlow Lite to platforma oprogramowania, zoptymalizowana wersja TensorFlow, przeznaczona do uruchamiania modeli TensorFlow na małych, stosunkowo słabych urządzeniach, takich jak telefony komórkowe.
TensorFlow Lite For Microcontrollers to platforma oprogramowania, zoptymalizowana wersja TensorFlow, która umożliwia uruchamianie modeli TensorFlow na małych, energooszczędnych urządzeniach, takich jak mikrokontrolery. Spełnia ona wymagania dotyczące tych środowisk wbudowanych, tzn.ma mały rozmiar binarny, nie wymaga obsługi systemu operacyjnego, żadnych standardowych bibliotek C ani C++ ani dynamicznej alokacji pamięci itp.
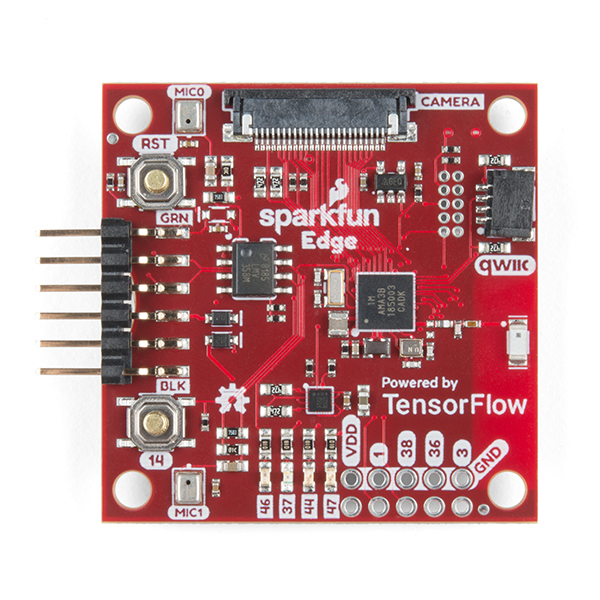
SparkFun Edge (sprzęt)
SparkFun Edge to platforma oparta na mikrokontrolerze, czyli mały komputer na jednej płytce drukowanej. Ma procesor, pamięć i sprzęt wejścia/wyjścia, który umożliwia wysyłanie i odbieranie sygnałów cyfrowych do innych urządzeń. Ma 4 diody LED sterowane oprogramowaniem w Twoich ulubionych kolorach Google.
W przeciwieństwie do komputera mikrokontroler nie ma systemu operacyjnego. Zamiast tego napisane przez Ciebie programy działają bezpośrednio na sprzęcie. Kod piszesz na komputerze i pobierasz go na mikrokontroler za pomocą urządzenia zwanego programatorem.
Mikrokontrolery nie są wydajnymi komputerami. Mają one małe procesory i niewiele pamięci. Ponieważ są one zaprojektowane tak, aby były jak najprostsze, mikrokontroler może zużywać bardzo mało energii. W zależności od tego, co robi program, SparkFun Edge może działać przez kilka tygodni na jednej baterii pastylkowej.
Czego się nauczysz
- Skompiluj przykładowy program dla SparkFun Edge na komputerze.
- Wdrażanie programu na urządzeniu
- Wprowadzanie zmian w programie i ponowne wdrażanie
Czego potrzebujesz
Potrzebujesz tych urządzeń:
- Komputer z systemem Linux lub macOS
- Płytka SparkFun Edge
- Programator SparkFun USB-C Serial Basic
- Kabel USB-C na USB-A (jeśli masz komputer z portem USB-C, użyj kabla USB-C na USB-C).
- (opcjonalnie) litowa bateria guzikowa 3 V o średnicy 20 mm (CR2032) do przeprowadzania wnioskowania bez programatora i kabla.
Potrzebne będzie to oprogramowanie:
- Git (sprawdź, czy jest zainstalowany, uruchamiając
gitw wierszu poleceń). - Python 3 (sprawdź, czy jest zainstalowany, uruchamiając polecenie
python3lubpython --versionw wierszu poleceń). - Pip dla Pythona 3 ( przydatna odpowiedź na StackOverflow)
- Musi to być wersja 4.2.1 lub nowsza (sprawdź, czy jest zainstalowana, wpisując
make --versionw wierszu poleceń). - Sterowniki SparkFun Serial Basic
2. Konfigurowanie sprzętu
Mikrokontroler SparkFun Edge ma fabrycznie zainstalowany plik binarny, który może uruchamiać model mowy. Zanim zastąpimy go naszą wersją, najpierw uruchommy ten model.
Zasilanie tablicy:
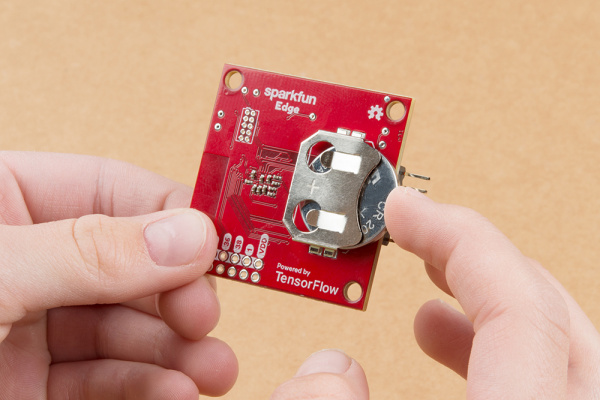
- Włóż baterię pastylkową do złącza baterii z tyłu płytki (stroną „+” baterii do góry). Jeśli bateria była już włożona do urządzenia, wyjmij plastikową zakładkę i dopchnij baterię, aby upewnić się, że jest dobrze włożona.
- Jeśli nie masz baterii pastylkowej, możesz użyć programatora SparkFun USB-C Serial Basic do zasilania płytki. Aby podłączyć to urządzenie do tablicy, wykonaj te czynności:
- Znajdź 6-pinowe złącze z boku SparkFun Edge.
- Podłącz SparkFun USB-C Serial Basic do tych pinów, upewniając się, że piny oznaczone jako „BLK” i „GRN” na każdym urządzeniu są prawidłowo ustawione.
- Połącz SparkFun USB-C Serial Basic z komputerem za pomocą kabla USB-C.
Po włączeniu płytki przez włożenie baterii lub podłączenie programatora USB płytka zostanie wybudzona i zacznie nasłuchiwać za pomocą mikrofonów. Niebieskie światło powinno zacząć migać.
Model uczenia maszynowego na płytce jest trenowany pod kątem rozpoznawania słów „tak” i „nie” oraz wykrywania obecności i braku mowy. Wyniki są sygnalizowane przez zapalanie kolorowych diod LED. W tabeli poniżej znajdziesz opis poszczególnych kolorów diody LED:
Wynik wykrywania | Kolor diody LED |
„Tak” | Żółty |
„Nie” | Czerwony |
Nieznana mowa | Zielony |
Nie wykryto mowy | Żadna dioda LED się nie świeci |
Wypróbuj
Przytrzymaj tablicę przy ustach i kilka razy powiedz „tak”. Żółta dioda LED zacznie migać. Jeśli po wypowiedzeniu słowa „tak” nic się nie dzieje, spróbuj wykonać te czynności:
- Trzymaj tabliczkę w odległości około 25 cm od ust.
- Unikaj nadmiernego szumu w tle
- Powtórz „tak” kilka razy z rzędu (spróbuj powiedzieć „tak tak tak”).
3. Konfigurowanie oprogramowania
Teraz pobierzemy, zainstalujemy i uruchomimy model mowy na mikrokontrolerze. W tym celu najpierw pobierzemy kod źródłowy tego programu i zależności potrzebne do jego skompilowania. Program jest napisany w języku C++, który przed pobraniem na płytkę musi zostać skompilowany do pliku binarnego. Plik binarny to plik zawierający program w formie, którą można uruchomić bezpośrednio na sprzęcie SparkFun Edge.
Poniższe instrukcje dotyczą systemów Linux i macOS.
Pobieranie repozytorium TensorFlow
Kod jest dostępny w repozytorium TensorFlow na GitHubie w tej lokalizacji:
https://github.com/tensorflow/tensorflow/tree/master/tensorflow/lite/micro
Otwórz terminal na komputerze, przejdź do katalogu, w którym zwykle przechowujesz projekty związane z kodowaniem, pobierz repozytorium TensorFlow i otwórz utworzony katalog, jak pokazano poniżej:
cd ~ # change into your home (or any other) directory git clone --depth 1 https://github.com/tensorflow/tensorflow.git cd tensorflow
Pobieranie zależności Pythona
Do przygotowania pliku binarnego i sflashowania go na urządzeniu użyjemy Pythona 3. Skrypty Pythona wymagają dostępności określonych bibliotek. Aby zainstalować te zależności, uruchom to polecenie:
pip3 install pycrypto pyserial --user
4. Tworzenie i przygotowywanie pliku binarnego
Skompilujemy plik binarny i uruchomimy polecenia, które przygotują go do pobrania na urządzenie.
Kompilowanie pliku binarnego
Aby pobrać wszystkie wymagane zależności i utworzyć plik binarny, uruchom to polecenie:
make -f tensorflow/lite/micro/tools/make/Makefile TARGET=sparkfun_edge micro_speech_bin
Jeśli kompilacja się powiedzie, ostatni wiersz danych wyjściowych powinien wyglądać tak:
arm-none-eabi-objcopy tensorflow/lite/micro/tools/make/gen/sparkfun_edge_cortex-m4/bin/micro_speech tensorflow/lite/micro/tools/make/gen/sparkfun_edge_cortex-m4/bin/micro_speech.bin -O binary
Aby sprawdzić, czy plik binarny został utworzony, uruchom to polecenie:
test -f \ tensorflow/lite/micro/tools/make/gen/sparkfun_edge_cortex-m4/bin/micro_speech.bin && \ echo "Binary was successfully created" || echo "Binary is missing"
W konsoli powinna się wyświetlić wartość Binary was successfully created. Jeśli widzisz symbol Binary is missing, oznacza to, że wystąpił problem z procesem kompilacji, który wymaga debugowania.
Przygotowywanie pliku binarnego
Aby można było wdrożyć plik binarny na urządzeniu, musi on być podpisany kluczami kryptograficznymi. Teraz uruchomimy kilka poleceń, które podpiszą nasz plik binarny, aby można go było pobrać na SparkFun Edge.
Aby skonfigurować przykładowe klucze kryptograficzne, których możemy używać na potrzeby programowania, wpisz to polecenie:
cp tensorflow/lite/micro/tools/make/downloads/AmbiqSuite-Rel2.2.0/tools/apollo3_scripts/keys_info0.py tensorflow/lite/micro/tools/make/downloads/AmbiqSuite-Rel2.2.0/tools/apollo3_scripts/keys_info.py
Teraz uruchom to polecenie, aby utworzyć podpisany plik binarny:
python3 tensorflow/lite/micro/tools/make/downloads/AmbiqSuite-Rel2.2.0/tools/apollo3_scripts/create_cust_image_blob.py \ --bin tensorflow/lite/micro/tools/make/gen/sparkfun_edge_cortex-m4/bin/micro_speech.bin \ --load-address 0xC000 \ --magic-num 0xCB \ -o main_nonsecure_ota \ --version 0x0
Spowoduje to utworzenie pliku main_nonsecure_ota.bin. Teraz uruchomimy kolejne polecenie, aby utworzyć ostateczną wersję pliku, którego można użyć do flashowania urządzenia za pomocą skryptu programu rozruchowego, którego użyjemy w następnym kroku:
python3 tensorflow/lite/micro/tools/make/downloads/AmbiqSuite-Rel2.2.0/tools/apollo3_scripts/create_cust_wireupdate_blob.py \ --load-address 0x20000 \ --bin main_nonsecure_ota.bin \ -i 6 \ -o main_nonsecure_wire \ --options 0x1
W katalogu, w którym zostały uruchomione polecenia, powinien pojawić się plik o nazwie main_nonsecure_wire.bin. To jest plik, który zostanie wgrany na urządzenie.
5. Przygotuj się na flashowanie pliku binarnego
Co to jest miganie?
SparkFun Edge przechowuje aktualnie uruchomiony program w 512 kilobajtach pamięci flash. Jeśli chcemy, aby płytka uruchomiła nowy program, musimy go do niej wysłać. Zostanie on zapisany w pamięci flash, zastępując poprzedni program.
Ten proces nazywa się „flashowaniem” i użyjemy go do przesłania programu na płytkę.
Podłączanie programatora do płytki
Do pobierania nowych programów na płytkę będziemy używać programatora szeregowego SparkFun USB-C Serial Basic. To urządzenie umożliwia komputerowi komunikację z mikrokontrolerem przez USB.
Aby podłączyć to urządzenie do tablicy, wykonaj te czynności:
- Znajdź 6-pinowe złącze z boku SparkFun Edge.
- Podłącz SparkFun USB-C Serial Basic do tych pinów, upewniając się, że piny oznaczone jako „BLK” i „GRN” na każdym urządzeniu są prawidłowo ustawione.
Podłącz programator do komputera
Połączymy tablicę z komputerem za pomocą kabla USB. Aby zaprogramować tablicę, musimy znać nazwę, pod jaką urządzenie jest widoczne na komputerze. Najlepiej jest sporządzić listę wszystkich urządzeń komputera przed podłączeniem i po podłączeniu, a następnie sprawdzić, które urządzenie jest nowe.
Przed podłączeniem urządzenia przez USB uruchom to polecenie:
If you are using Linux: ls /dev/tty* If you are using MacOS: ls /dev/cu*
Powinna się wyświetlić lista podłączonych urządzeń podobna do tej:
/dev/cu.Bluetooth-Incoming-Port /dev/cu.MALS /dev/cu.SOC
Teraz podłącz programator do portu USB komputera. Ponownie wpisz to polecenie:
If you are using Linux: ls /dev/tty* If you are using MacOS: ls /dev/cu*
W danych wyjściowych powinien pojawić się dodatkowy element, jak w przykładzie poniżej. Nowy produkt może mieć inną nazwę. Nowy element to nazwa urządzenia.
/dev/cu.Bluetooth-Incoming-Port /dev/cu.MALS /dev/cu.SOC /dev/cu.wchusbserial-1450
Najpierw utworzymy zmienną środowiskową, która będzie zawierać nazwę urządzenia:
export DEVICENAME=put your device name here
Następnie utworzymy zmienną środowiskową, aby określić szybkość transmisji, czyli szybkość, z jaką dane będą wysyłane do urządzenia:
export BAUD_RATE=921600
6. Flashowanie pliku binarnego
Uruchom skrypt, aby flashować płytkę
Aby flashować płytkę, musimy wprowadzić ją w specjalny stan „programu rozruchowego”, który przygotuje ją do przyjęcia nowego pliku binarnego. Następnie uruchomimy skrypt, aby wysłać plik binarny na płytę.
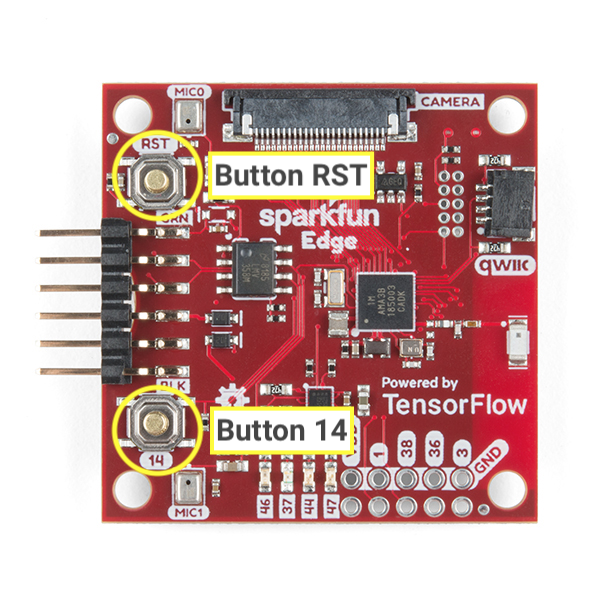
Poznajmy te przyciski na tablicy:
Aby zresetować i sflashować płytkę:
- Sprawdź, czy płytka jest podłączona do programatora, a cały zestaw jest połączony z komputerem przez USB.
- Zacznij od przytrzymania przycisku oznaczonego symbolem
14na planszy. Przytrzymaj go do kroku 6. - Nadal przytrzymując przycisk oznaczony symbolem
14, kliknij przycisk oznaczony symbolemRST, aby zresetować płytkę i przywrócić ją do stanu programu rozruchowego. - Przytrzymując przycisk oznaczony symbolem
14, wklej w terminalu to polecenie i naciśnij Enter, aby je uruchomić (dla wygody możesz wkleić to polecenie w terminalu, zanim zaczniesz przytrzymywać przycisk, ale nie naciskaj Entera, dopóki nie przejdziesz do tego kroku).
python3 tensorflow/lite/micro/tools/make/downloads/AmbiqSuite-Rel2.2.0/tools/apollo3_scripts/uart_wired_update.py -b ${BAUD_RATE} ${DEVICENAME} -r 1 -f main_nonsecure_wire.bin -i 6
- Przytrzymując przycisk oznaczony symbolem
14, zobaczysz na ekranie coś podobnego do tego:
Connecting with Corvette over serial port /dev/cu.usbserial-1440... Sending Hello. Received response for Hello Received Status length = 0x58 version = 0x3 Max Storage = 0x4ffa0 Status = 0x2 State = 0x7 AMInfo = 0x1 0xff2da3ff 0x55fff 0x1 0x49f40003 0xffffffff [...lots more 0xffffffff...] Sending OTA Descriptor = 0xfe000 Sending Update Command. number of updates needed = 1 Sending block of size 0x158b0 from 0x0 to 0x158b0 Sending Data Packet of length 8180 Sending Data Packet of length 8180 [...lots more Sending Data Packet of length 8180...]
- Przestań przytrzymywać przycisk oznaczony symbolem
14na tablicy po zobaczeniu symboluSending Data Packet of length 8180(ale możesz go nadal przytrzymywać). Program będzie nadal drukować wiersze w terminalu. Ostatecznie będzie wyglądać mniej więcej tak:
[...lots more Sending Data Packet of length 8180...] Sending Data Packet of length 8180 Sending Data Packet of length 6440 Sending Reset Command. Done.
Jeśli zobaczysz Done, oznacza to udane miganie. Jeśli wynik programu kończy się błędem, sprawdź, czy wydrukowano znak Sending Reset Command. Jeśli tak, mimo błędu prawdopodobnie udało się przeprowadzić flashowanie.
Na komputerze z systemem Linux może pojawić się znak NoResponse Error. Dzieje się tak, ponieważ sterownik szeregowy ch34x został zainstalowany obok istniejącego sterownika szeregowego. Możesz to rozwiązać w ten sposób:
Krok 1. Zainstaluj ponownie prawidłową wersję biblioteki ch34x. Podczas instalacji urządzenie musi być odłączone od komputera.
git clone https://github.com/juliagoda/CH341SER.git cd CH341SER/ make sudo insmod ch34x.ko sudo rmmod ch341
Krok 2. Podłącz płytkę przez USB i uruchom:
dmesg | grep "ch34x"
Wyświetli się komunikat podobny do tego:
[ 1299.444724] ch34x_attach+0x1af/0x280 [ch34x] [ 1299.445386] usb 2-13.1: ch34x converter now attached to ttyUSB0
Jeśli używany sterownik nie jest sterownikiem „ch34x” (np. ch341), spróbuj wyłączyć inny sterownik, uruchamiając to polecenie:
rmmod <non-ch34x driver name>
Odłącz i ponownie podłącz urządzenie. Sprawdź, czy używany sterownik to „ch34x”.
7. Prezentacja
Wypróbuj program
Gdy płytka zostanie zaprogramowana, kliknij przycisk oznaczony .
RST, aby ponownie uruchomić tablicę i rozpocząć program. Jeśli niebieska dioda LED zacznie migać, instalacja się powiodła. Jeśli nie, przewiń w dół do sekcji „Co zrobić, jeśli to nie zadziała?”.
Model uczenia maszynowego na płytce jest trenowany pod kątem rozpoznawania słów „tak” i „nie” oraz wykrywania obecności i braku mowy. Wyniki są sygnalizowane przez zapalanie kolorowych diod LED. W tabeli poniżej znajdziesz opis poszczególnych kolorów diody LED:
Wynik wykrywania | Kolor diody LED |
„Tak” | Żółty |
„Nie” | Czerwony |
Nieznana mowa | Zielony |
Nie wykryto mowy | Żadna dioda LED się nie świeci |
Wypróbuj
Przytrzymaj tablicę przy ustach i kilka razy powiedz „tak”. Żółta dioda LED zacznie migać. Jeśli po wypowiedzeniu słowa „tak” nic się nie dzieje, spróbuj wykonać te czynności:
- Trzymaj tabliczkę w odległości około 25 cm od ust.
- Unikaj nadmiernego szumu w tle
- Powtórz „tak” kilka razy z rzędu (spróbuj powiedzieć „tak tak tak”).
Co zrobić, jeśli to nie zadziała?
Oto niektóre możliwe problemy i sposoby ich rozwiązywania:
Problem: po flashowaniu żadna dioda LED się nie włącza.
Rozwiązanie: spróbuj nacisnąć przycisk RST lub odłączyć i ponownie podłączyć płytkę do programatora. Jeśli żadna z tych czynności nie rozwiąże problemu, spróbuj ponownie wgrać oprogramowanie na płytkę.
Problem: niebieska dioda LED świeci, ale bardzo słabo.
Rozwiązanie: wymień baterię, ponieważ jest bliska wyczerpania. Płytę można też zasilać z komputera za pomocą programatora i kabla.
8. Odczytaj dane wyjściowe debugowania (opcjonalnie)
Zapoznaj się z tą sekcją, jeśli masz problemy i musisz szczegółowo debugować kod. Aby zrozumieć, co się dzieje na mikrokontrolerze podczas działania kodu, możesz wyświetlić informacje na potrzeby debugowania za pomocą połączenia szeregowego płytki. Za pomocą komputera łączysz się z tablicą i wyświetlasz dane, które ona wysyła.
Otwieranie połączenia szeregowego
Domyślnie nasz przykładowy kod SparkFun Edge rejestruje wszystkie wypowiadane polecenia wraz z ich wiarygodnością. Aby zobaczyć dane wyjściowe płytki, możesz uruchomić to polecenie:
screen ${DEVICENAME} 115200
Początkowo możesz zobaczyć dane wyjściowe podobne do tych poniżej (pojawiają się one tylko wtedy, gdy płytka zostanie zresetowana po podłączeniu, w przeciwnym razie możesz zacząć widzieć informacje na potrzeby debugowania):
Apollo3 Burst Mode is Available
Apollo3 operating in Burst Mode (96MHz)
Spróbuj wydać kilka poleceń, mówiąc „tak” lub „nie”. Dla każdego polecenia powinny być widoczne informacje o debugowaniu drukowania tablicy:
Heard yes (202) @65536ms
W powyższym logu yes oznacza polecenie. Liczba 202 odnosi się do poziomu pewności, że polecenie zostało usłyszane (200 to minimum). 65536ms to czas, który upłynął od ostatniego zresetowania mikrokontrolera.
Aby przestać wyświetlać dane wyjściowe debugowania, naciśnij kolejno klawisze Ctrl+A, K i Y.
Zapisywanie dzienników debugowania
Kod, który rejestruje te informacje, znajdziesz w pliku command_responder.cc, z którym właśnie pracujesz:
tensorflow/lite/micro/examples/micro_speech/sparkfun_edge/command_responder.cc
Aby rejestrować dane, możesz wywołać metodę error_reporter->Report(). Obsługuje standardowe tokeny printf do interpolacji ciągów znaków, których możesz używać do umieszczania w logach ważnych informacji:
error_reporter->Report("Heard %s (%d) @%dms", found_command, score, current_time);
Ta metoda przyda Ci się, gdy w następnej sekcji będziesz wprowadzać własne zmiany w kodzie.
9. Przedłuż kod (opcjonalnie)
Teraz, gdy wiesz już, jak skompilować i flashować oprogramowanie na SparkFun Edge, możesz zacząć eksperymentować z kodem i wdrażać go na urządzeniu, aby zobaczyć wyniki.
Odczytaj kod
Dobrym miejscem na rozpoczęcie czytania kodu jest ten plik: command_responder.cc.
tensorflow/lite/micro/examples/micro_speech/sparkfun_edge/command_responder.cc
Plik możesz zobaczyć na GitHubie tutaj.
Metoda w tym pliku, RespondToCommand, jest wywoływana, gdy zostanie wykryte polecenie głosowe. Obecny kod włącza inną diodę LED w zależności od tego, czy usłyszano polecenie „tak”, „nie” czy nieznane. Poniższy fragment kodu pokazuje, jak to działa:
if (found_command[0] == 'y') {
am_hal_gpio_output_set(AM_BSP_GPIO_LED_YELLOW);
}
if (found_command[0] == 'n') {
am_hal_gpio_output_set(AM_BSP_GPIO_LED_RED);
}
if (found_command[0] == 'u') {
am_hal_gpio_output_set(AM_BSP_GPIO_LED_GREEN);
}
Argument found_command zawiera nazwę wykrytego polecenia. Sprawdzając pierwszy znak, ten zestaw if instrukcji określa, która dioda LED ma się świecić.
Metoda RespondToCommand jest wywoływana z kilkoma argumentami:
void RespondToCommand(tflite::ErrorReporter* error_reporter,
int32_t current_time, const char* found_command,
uint8_t score, bool is_new_command) {
error_reportersłuży do rejestrowania informacji o debugowaniu (więcej informacji znajdziesz poniżej).current_timeoznacza czas wykrycia polecenia.found_commandinformuje, które polecenie zostało wykryte.scoreinformuje nas, na ile jesteśmy pewni, że wykryliśmy polecenie.is_new_commandinformuje nas, czy polecenie zostało usłyszane po raz pierwszy.
score to liczba całkowita z zakresu 0–255, która reprezentuje prawdopodobieństwo wykrycia polecenia. Przykładowy kod uznaje polecenie za prawidłowe tylko wtedy, gdy wynik jest większy niż 200. Z naszych testów wynika, że większość prawidłowych poleceń mieści się w zakresie 200–210.
Modyfikowanie kodu
Płytka SparkFun Edge ma 4 diody LED. Obecnie migamy niebieską diodą LED, aby wskazać, że trwa rozpoznawanie. Możesz to sprawdzić w pliku command_responder.cc:
static int count = 0;
// Toggle the blue LED every time an inference is performed.
++count;
if (count & 1) {
am_hal_gpio_output_set(AM_BSP_GPIO_LED_BLUE);
} else {
am_hal_gpio_output_clear(AM_BSP_GPIO_LED_BLUE);
}
Mamy 4 diody LED, więc zmodyfikujmy program, aby używać ich jako wizualnego wskaźnika score danego polecenia. Niski wynik będzie oznaczał jedną zapaloną diodę LED, a wysoki – kilka.
Aby mieć pewność, że program działa, sprawimy, że czerwona dioda LED będzie migać w sposób ciągły zamiast niebieskiej. Sąsiednie diody LED w kolorze niebieskim, zielonym i żółtym będą wskazywać siłę ostatniego score. Dla uproszczenia zapalimy diody LED tylko wtedy, gdy zostanie wypowiedziane słowo „tak”. Jeśli zostanie wykryte inne słowo, diody LED zgasną.
Aby wprowadzić tę zmianę, zastąp cały kod w pliku command_responder.cc tym fragmentem:
#include "tensorflow/lite/micro/examples/micro_speech/command_responder.h"
#include "am_bsp.h"
// This implementation will light up the LEDs on the board in response to different commands.
void RespondToCommand(tflite::ErrorReporter* error_reporter,
int32_t current_time, const char* found_command,
uint8_t score, bool is_new_command) {
static bool is_initialized = false;
if (!is_initialized) {
// Setup LEDs as outputs
am_hal_gpio_pinconfig(AM_BSP_GPIO_LED_RED, g_AM_HAL_GPIO_OUTPUT_12);
am_hal_gpio_pinconfig(AM_BSP_GPIO_LED_BLUE, g_AM_HAL_GPIO_OUTPUT_12);
am_hal_gpio_pinconfig(AM_BSP_GPIO_LED_GREEN, g_AM_HAL_GPIO_OUTPUT_12);
am_hal_gpio_pinconfig(AM_BSP_GPIO_LED_YELLOW, g_AM_HAL_GPIO_OUTPUT_12);
// Ensure all pins are cleared
am_hal_gpio_output_clear(AM_BSP_GPIO_LED_RED);
am_hal_gpio_output_clear(AM_BSP_GPIO_LED_BLUE);
am_hal_gpio_output_clear(AM_BSP_GPIO_LED_GREEN);
am_hal_gpio_output_clear(AM_BSP_GPIO_LED_YELLOW);
is_initialized = true;
}
static int count = 0;
// Toggle the red LED every time an inference is performed.
++count;
if (count & 1) {
am_hal_gpio_output_set(AM_BSP_GPIO_LED_RED);
} else {
am_hal_gpio_output_clear(AM_BSP_GPIO_LED_RED);
}
if (is_new_command) {
// Clear the last three LEDs
am_hal_gpio_output_clear(AM_BSP_GPIO_LED_BLUE);
am_hal_gpio_output_clear(AM_BSP_GPIO_LED_GREEN);
am_hal_gpio_output_clear(AM_BSP_GPIO_LED_YELLOW);
error_reporter->Report("Heard %s (%d) @%dms", found_command, score,
current_time);
// Only indicate a 'yes'
if (found_command[0] == 'y') {
// Always light the blue LED
am_hal_gpio_output_set(AM_BSP_GPIO_LED_BLUE);
// Light the other LEDs depending on score
if (score >= 205) {
am_hal_gpio_output_set(AM_BSP_GPIO_LED_GREEN);
}
if(score >= 210) {
am_hal_gpio_output_set(AM_BSP_GPIO_LED_YELLOW);
}
}
}
}
Jeśli zostanie wykryte nowe polecenie, wartość is_new_command będzie wynosić „true”. Wyłączymy diody LED niebieską, zieloną i żółtą, a następnie włączymy je ponownie w zależności od wartości found_command i score.
Ponowne tworzenie i flashowanie
Po wprowadzeniu zmian w kodzie przetestuj go, wykonując wszystkie czynności z sekcji Kompilowanie i przygotowywanie pliku binarnego.
10. Następne kroki
Gratulujemy! Udało Ci się utworzyć pierwszy detektor mowy na mikrokontrolerze.
Mamy nadzieję, że to krótkie wprowadzenie do programowania z użyciem TensorFlow Lite dla mikrokontrolerów było dla Ciebie przydatne. Koncepcja deep learningu na mikrokontrolerach jest nowa i ekscytująca, dlatego zachęcamy do eksperymentowania.
Dokumentacja
- Wytrenuj własny model, aby rozpoznawał różne polecenia, teraz gdy masz już doświadczenie w pracy z podstawowym programem. Uwaga: trenowanie potrwa kilka godzin.
- Więcej informacji o TensorFlow Lite dla mikrokontrolerów znajdziesz na stronie internetowej i w GitHub.
- Wypróbuj inne przykłady i uruchom je na SparkFun Edge, jeśli jest obsługiwany.
- Zapoznaj się z książką O’Reilly TinyML: Machine Learning with TensorFlow on Arduino and Ultra-Low Power Micro-Controllers, która wprowadza w tematykę uczenia maszynowego na małych urządzeniach i zawiera opis kilku ciekawych projektów. Ten codelab jest oparty na rozdziałach 7 i 8 książki.
Dziękujemy i życzymy udanego budowania!