
1. 简介
在此 Codelab 中,您将使用智能体开发套件 (ADK) 构建一个复杂的马拉松规划智能体。您将逐步了解智能体的各种功能,从结构良好的系统提示到动态技能加载和 MCP 工具映射。最后,您将在本地测试代理并将其部署到代理运行时 (Agent Engine)。
您将执行的操作
- 初始化新的 ADK 代理项目
- 使用结构化构建器撰写可靠的系统提示
- 添加 Google 地图 MCP 工具,以获取现实世界的位置背景信息
- 将技能动态加载到代理的工具集中
- 在本地测试代理执行
- 将智能体部署到 Agent Engine (Cloud Run)
所需条件
- 网络浏览器,例如 Chrome
- 启用了结算功能的 Google Cloud 项目
- 基本熟悉 Python
此 Codelab 适合希望构建专业生成式 AI 代理的中级开发者。
预计时长:45 分钟
本 Codelab 中创建的资源费用应低于 2 美元。
2. 准备工作
创建 Google Cloud 项目
- 在 Google Cloud 控制台的项目选择器页面上,选择或创建一个 Google Cloud 项目。
- 确保您的 Cloud 项目已启用结算功能。了解如何检查项目是否已启用结算功能。
启动 Cloud Shell
Cloud Shell 是在 Google Cloud 中运行的命令行环境,预加载了必要的工具。
- 点击 Google Cloud 控制台顶部的激活 Cloud Shell。
- 连接到 Cloud Shell 后,验证您的身份验证:
gcloud auth list - 确认您的项目已配置:
gcloud config get project - 如果项目未按预期设置,请进行设置:
export PROJECT_ID=<YOUR_PROJECT_ID> gcloud config set project $PROJECT_ID
验证身份验证:
gcloud auth list
确认您的项目:
gcloud config get project
根据需要进行设置:
export PROJECT_ID=<YOUR_PROJECT_ID> gcloud config set project $PROJECT_ID
启用 API
运行以下命令可启用所有必需的 API:
gcloud services enable \ aiplatform.googleapis.com \ run.googleapis.com \ secretmanager.googleapis.com \ mapstools.googleapis.com \ storage.googleapis.com \ cloudresourcemanager.googleapis.com \ serviceusage.googleapis.com
创建 Google 地图 API 密钥
如需使用 Google 地图 MCP 工具,您需要生成 Google 地图 API 密钥。
- 在 Google Cloud 控制台中,使用搜索栏前往 Google Maps Platform > 凭据。
- 如果系统提示,请确认您的 Google Cloud 项目。
- 点击创建凭证,然后选择 API 密钥。
- 复制生成的 API 密钥。下一步操作将会用到该地址。
3. 设置您的环境
在此 Codelab 中,代码托管在 GitHub 上。您将克隆包含目录结构和所需子组件(例如 skills/ 目录)的代码库。
- 克隆代码库并前往项目文件夹:
git clone https://github.com/GoogleCloudPlatform/next-26-keynotes cd next-26-keynotes/devkey/demo-1
- 设置 Python 虚拟环境并安装 ADK:
uv venv source .venv/bin/activate uv sync
- 设置您的地图 API 密钥。应用会从环境变量中读取该值:
export GOOGLE_MAPS_API_KEY="<YOUR_MAPS_API_KEY>"
配置环境变量
模拟器代理使用 .env 文件进行配置。复制示例文件,并使用您的项目 ID 对其进行更新。
- 复制示例环境文件:
cp planner_agent/sample.env planner_agent/.env
- 打开
planner_agent/.env,使用实际的 Google Cloud 项目 ID 更新GOOGLE_CLOUD_PROJECT字段,并使用您创建的 Google Maps API 密钥更新GOOGLE_MAPS_API_KEY字段。
文件内容应如下所示:
GOOGLE_GENAI_USE_VERTEXAI=1
GOOGLE_CLOUD_PROJECT=<YOUR_PROJECT_ID>
GOOGLE_CLOUD_LOCATION=global
GOOGLE_MAPS_API_KEY=<YOUR_MAPS_API_KEY>
GOOGLE_CLOUD_AGENT_ENGINE_ENABLE_TELEMETRY=true
OTEL_PYTHON_LOGGING_AUTO_INSTRUMENTATION_ENABLED=true
OTEL_INSTRUMENTATION_GENAI_CAPTURE_MESSAGE_CONTENT=true
ADK_CAPTURE_MESSAGE_CONTENT_IN_SPANS=true
4. 创建新的 ADK 代理
探索定义代理的核心文件:planner_agent/agent.py。
在 build-agents-with-skills 代码库中,智能体使用 ADK 的 Agent 类进行初始化。它指定了底层模型、身份名称,并提取了在其他模块中定义的指令和工具。
打开 planner_agent/agent.py 以检查初始化代码:
instruction="Answer user questions to the best of your knowledge"
description="A helpful assistant for user questions."
tools=[]
# ...
root_agent = Agent(
model='gemini-3-flash-preview',
name='planner_agent',
description=description,
instruction=instruction,
tools=tools
)
Agent 类可抽象出消息记录、工具编排和大语言模型通信,让您专注于智能体的行为。
目前,该代理非常通用。您可以像与任何其他 LLM 互动一样与它互动。
uv run adk run planner_agent
此命令将开始与代理对话。它使用 gemini-3-flash-preview 作为模型,可以回答基本问题。
Running agent planner_agent, type exit to exit.
[user]: What is the length of a Marathon
[planner_agent]: The official length of a marathon is **26.2 miles**, which is
equivalent to **42.195 kilometers**.
代理已经知道一些关于马拉松的事实。不过,这还不足以规划一场包含规则和路线规划的马拉松。
5. 创建系统提示
系统提示(指令)决定了代理的行为。此项目不使用单个巨型字符串,而是使用 PromptBuilder (planner_agent/utils.py) 来动态组合指令。
打开 planner_agent/prompts.py,查看提示如何划分为各个逻辑部分:
from collections import OrderedDict
from .utils import PromptBuilder
ROLE = """\
...
"""
RULES = """\
...
"""
WORKFLOW = """\
...
"""
###
# Planner instructions with no tools mentioned
PLANNER_INSTRUCTION_NO_TOOLS = PromptBuilder(
OrderedDict(
role=ROLE,
rules=RULES,
tools=TOOLS_PROMPT_ONLY,
workflow=WORKFLOW_PROMPT_ONLY,
)
).build()
# Planner instruction with skills and tools defined
PLANNER_INSTRUCTION = PromptBuilder(
OrderedDict(
role=ROLE,
rules=RULES,
skills=SKILLS,
tools=TOOLS,
workflow=WORKFLOW,
)
).build()
在 planner_agent/agent.py 中,此内容已导入。
找到包含 TODO: Replace Instruction and Description 的部分,然后取消对 instruction 和 description 变量重新赋值的注释。
相应代码部分应如下所示:
instruction=PLANNER_INSTRUCTION_NO_TOOLS
description="Expert GIS analyst for marathon route and event planning."
您正在导入代理的提示版本,该版本未引用任何工具。您将在后面的步骤中添加工具。
您可以测试此版本的代理:
uv run adk run planner_agent
在对话窗口中,发送以下提示:
Plan a marathon for 10000 participants in Las Vegas on April 24, 2027 in the
evening timeframe
过一会儿,您应该会收到类似如下所示的回答:
Running agent planner_agent, type exit to exit.
[user]: Plan a marathon for 10000 participants in Las Vegas on April 24, 2027 in the evening timeframe
[planner_agent]: Here is the comprehensive marathon plan for Las Vegas.
As requested, I have designed this event for an evening start on April 24, 2027. Because certain parameters (theme and budget) were not specified, I have applied pragmatic defaults: this will be a "Neon Nights" scenic theme to capitalize on the evening Strip, operating on a moderate-to-high budget given the infrastructure needed to secure major Las Vegas corridors.
### 1. Intent Alignment
* **City & Theme:** Las Vegas, Nevada. Theme: "Neon Nights" an evening race maximizing the visual impact of the illuminated city.
* **Date & Time:** Saturday, April 24, 2027. Late April evenings in Las Vegas offer optimal running weather (temperatures dropping from ~70°F at sunset to ~60°F). Race start is 6:30 PM (sunset is approx. 7:20 PM).
...
...
通过明确的提示,输出结果已经非常接近预期结果。在下一步中,您将添加工具,以将智能体提升到新的水平。
6. 添加技能和工具
如需在 planner_agent/agent.py 中启用技能和工具,请找到包含 TODO: Replaces Tools 的部分,并将接下来的两行取消注释。您的代码应如下所示:
instruction=PLANNER_INSTRUCTION
tools=get_tools()
这是此步骤中唯一需要更改的代码。本部分的其余内容将介绍技能和工具背后的概念。
技能
智能体技能是 ADK 智能体可用于执行特定任务的独立功能单元。智能体技能根据智能体技能规范封装了任务所需的必要指令、资源和工具。技能的结构使其能够以增量方式加载,从而最大限度地减少对代理操作上下文窗口的影响。
对于马拉松规划代理,定义了 3 项技能:
- gis-spatial-engineering - 负责处理 GeoJSON 数据以创建马拉松路线。
- 地图 - 使用 Google 地图工具搜索地点和天气信息。
- race-director - 验证马拉松路线是否符合规划指南。
技能可以包含脚本、其他资源和参考文件。
应用会加载所有技能,并在 planner_agent/tools.py 中将它们作为工具提供。请注意 get_tools() 函数中是如何实现这一点的:
def get_tools() -> list:
"""Build the planner's tool list with lazy-loaded skills."""
from google.adk.code_executors.unsafe_local_code_executor import UnsafeLocalCodeExecutor
skills_dir = pathlib.Path(__file__).parent / "skills"
skills = []
if skills_dir.exists():
skills = [
load_skill_from_dir(d)
for d in sorted(skills_dir.iterdir())
if d.is_dir() and not d.name.startswith("_") and (d / "SKILL.md").exists()
]
additional_tools = _load_additional_tools(skills_dir)
skill_toolset = SkillToolset(
skills=skills,
code_executor=UnsafeLocalCodeExecutor(),
additional_tools=additional_tools,
)
tools = [
skill_toolset,
PreloadMemoryTool(),
]
tools.extend(get_maps_tools())
return tools
最有趣的部分是 ADK 中的 load_skill_from_dir 方法。在 ADK 中,还可以通过内嵌方式创建技能。虽然在此 Codelab 中未使用,但它看起来大致如下所示:
from google.adk.skills import models
greeting_skill = models.Skill(
frontmatter=models.Frontmatter(
name="greeting-skill",
description=(
"A friendly greeting skill that can say hello to a specific person."
),
),
instructions=(
"Step 1: Read the 'references/hello_world.txt' file to understand how"
" to greet the user. Step 2: Return a greeting based on the reference."
),
resources=models.Resources(
references={
"hello_world.txt": "Hello! So glad to have you here!",
"example.md": "This is an example reference.",
},
),
)
添加了映射工具
马拉松规划工具需要空间背景信息才能生成路线。您可以通过集成 Google 地图 MCP(Model Context Protocol)服务器来提供此信息。
在 planner_agent/tools.py 中,请注意 MCP 服务器是如何通过 ApiRegistry 工具注册的:
from google.adk.integrations.api_registry import ApiRegistry
class MapsApiRegistry(ApiRegistry):
"""ApiRegistry subclass that strips ADC headers to force API key auth."""
def get_toolset(self, *args, **kwargs): # noqa: ANN002, ANN003
toolset = super().get_toolset(*args, **kwargs)
conn = getattr(toolset, "_connection_params", None)
headers = getattr(conn, "headers", None) if conn else None
if headers:
headers.pop("Authorization", None) # type: ignore[union-attr]
headers.pop("x-goog-user-project", None) # type: ignore[union-attr]
return toolset
def get_maps_tools() -> list:
"""Return Maps MCP toolset if configured."""
project_id = os.getenv("GOOGLE_CLOUD_PROJECT", "").strip()
maps_key = _resolve_maps_key()
if not project_id or not maps_key:
return []
# Map the MCP server location on Google Cloud
mcp_server_name = f"projects/{project_id}/locations/global/mcpServers/google-mapstools.googleapis.com-mcp"
# Initialize the custom API registry that supports header injection
api_registry = MapsApiRegistry(
api_registry_project_id=project_id,
header_provider=header_provider,
)
return [api_registry.get_toolset(mcp_server_name=mcp_server_name)]
添加 MCP 工具集后,智能体便会自动获得查询 Google 地图以获取路线、海拔和位置详细信息的能力!
7. 在本地运行代理
现在,代理、提示和工具已连接在一起,请在本地运行代理。这次,您将使用 adk web,以便查看技能加载和工具调用事件。
uv run adk web
您应该会看到类似如下内容
INFO: Started server process [99665]
INFO: Waiting for application startup.
+-----------------------------------------------------------------------------+
| ADK Web Server started |
| |
| For local testing, access at http://127.0.0.1:8000. |
+-----------------------------------------------------------------------------+
INFO: Application startup complete.
INFO: Uvicorn running on http://127.0.0.1:8000 (Press CTRL+C to quit)
- 打开浏览器,然后前往终端中显示的网址(通常为
http://localhost:8000)。 - 在左上角的下拉菜单中,选择
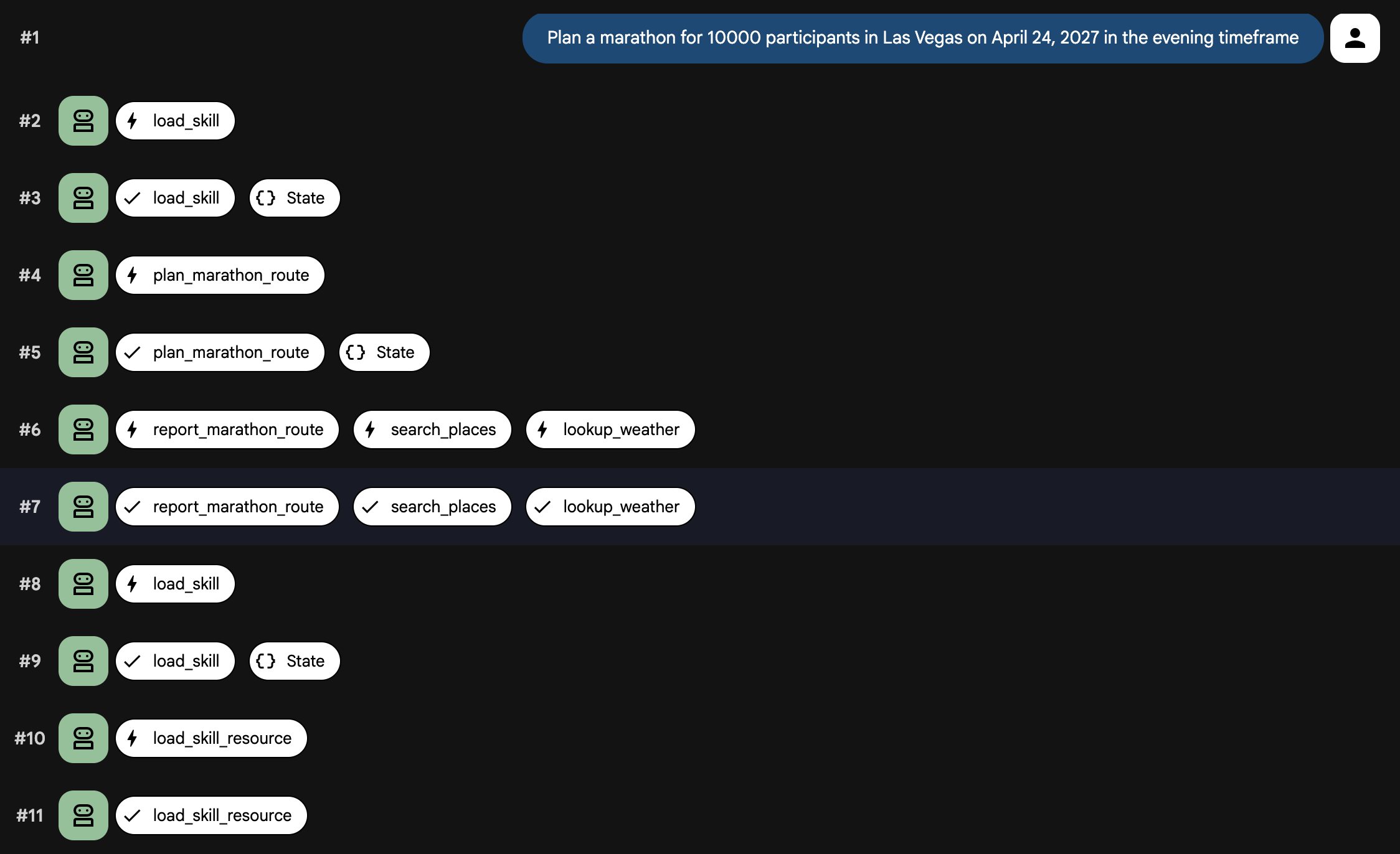
planner_agent。 - 在对话窗口中,发送以下提示:
Plan a marathon for 10000 participants in Las Vegas on April 24, 2027 in the
evening timeframe
您应该会看到技能正在加载,并且工具正在被调用。片刻之后,智能体便会生成马拉松计划。
界面应如下所示:
8. 部署代理
如果您对代理在本地的表现感到满意,则可以将其部署到 Agent Engine,后者可在 Cloud Run 上安全地托管代理。
如需部署智能体,请使用 ADK CLI 部署命令:
uv run adk deploy agent_engine \ --env_file planner_agent/.env --region=us-central1 \ planner_agent
部署完成后,CLI 会输出代理的安全托管端点。现在,您可以将此端点集成到前端应用、聊天机器人或其他后端系统中。您还可以使用代理运行时 Playground 来测试代理。
输出如下所示:
Files and dependencies resolved Deploying to agent engine... ✅ Created agent engine: projects/<PROJECT_ID>/locations/us-west1/reasoningEngines/<AGENT_ID>
您可以使用提供的 Python 脚本与代理进行通信。
- 复制示例环境文件:
cp sample.env .env
- 打开
.env,然后使用您的实际 Google Cloud 项目 ID 更新GOOGLE_CLOUD_PROJECT字段。
文件应如下所示:
GOOGLE_CLOUD_PROJECT=<YOUR_PROJECT_ID>
GOOGLE_CLOUD_LOCATION=us-central1
- 您可以列出项目中的代理。
python main.py list
您应该会看到类似如下内容
Listing deployed agents... ID: <AGENT_ID> | Display Name: planner_agent
获得已部署的代理 ID 后,您可以发送提示:
export AGENT_ID=<AGENT_ID>
python main.py prompt --agent-id ${AGENT_ID} --message "Plan a marathon for
10000 participants in Las Vegas on April 24, 2027 in the evening timeframe"
您将看到如下所示的输出:
Streaming response from agent <AGENT_ID>:
{'model_version': 'gemini-3-flash-preview', 'content': {'parts': [{'text': 'Here is a comprehensive
...
...
...
9. 清理
为避免系统向您的 Google Cloud 账号持续收取费用,请删除本 Codelab 中创建的资源。
删除部署创建的 Cloud Run 服务:
python main.py delete --agent-id ${AGENT_ID}
如果您已将地图 API 密钥存储在 Secret Manager 中,请删除相应 Secret:
gcloud secrets delete maps-api-key --project=$PROJECT_ID
如果您为此 Codelab 创建了新的 Google Cloud 云项目,可以删除整个项目,以移除与其关联的所有资源和 API:
gcloud projects delete $PROJECT_ID
10. 恭喜
恭喜!您已使用 ADK 构建了一个复杂的马拉松规划器代理。
您学到的内容
- 初始化智能体开发套件 (ADK) 项目
- 利用
PromptBuilder实现模块化系统提示 - 使用 MCP 工具和
ApiRegistry集成地图功能 - 使用
SkillToolset有条件地加载技能 - 在本地进行测试并部署到 Agent Engine